
{{ post.title }}
글 편집
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.tutorial.upload_filename }} | Attached File | {{ post.file.upload_filename }} |

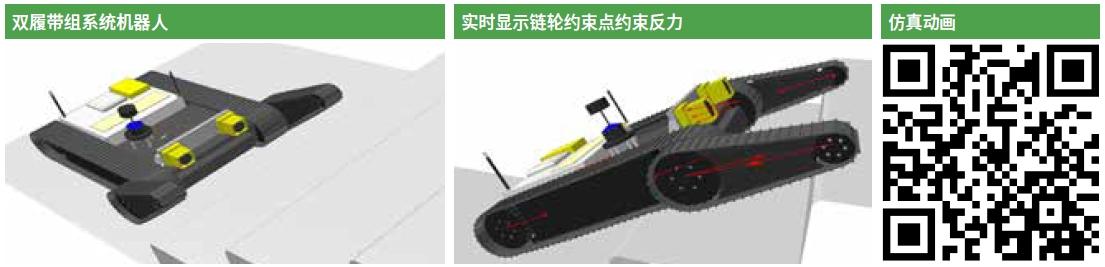
ㆍ 研究产品 :履带式城市侦察机器人
ㆍ 分析目标 :机器人爬楼梯性能评价
侦察机器人正在多种行驶环境中执行任务。其中,由于城市行驶环境中存在很多楼梯,侦察机器人的爬楼梯性能 是重要因素之一。在爬楼梯的各种方法中,使用副履带的方法可以增加履带与楼梯接触的面积,提高接触力,提 高爬楼梯性能。另外,在平地行驶时,将副履带向上旋转,提高一般行驶和旋转时的效率。开发该形式的侦察机器 人的一个研究小组利用RecurDyn的履带工具包,轻松地对包含复杂履系统的机器人进行建模,并利用它有效地 验证了爬楼梯性能。
仿真过程
① 快速准确地建立复杂的履带组件
② 定义履带与楼梯间接触参数
③ 用直观、简单的数学表达式定义机器人各部件的运动
④ 计算驱动和爬楼梯所需的扭矩,用于确定适当的电机容量
关键仿真技术
• 专用UI可快速装配履带系统,实现快速建模
• 高速计算履带板和楼梯间接触的接触算法
• “Function Expression” 用于复杂动作的数学建模
工具包
• RecurDyn/Professional
• RecurDyn/TrackHM
工程问题
• 需要提前验证新概念机器人能否完成任务
• 由许多履带链节组成的复杂机器人模型 •楼梯和履带板之间的复杂接触条件
• 需要模拟原地转弯和攀爬等复杂动作
• 难以估计驱动机器人的适当电机容量
解决方案
• 通过高保真履带虚拟模型进行不同驾驶场景下的仿真
• 履带组件专用的快速自动接触检测算法
• 机器人驱动力矩的定量估计

结论
• 早期阶段使用虚拟模型验证新设计
• 确定行驶和爬楼梯所需的电机容量以及能耗
• 确认机器人运动的极限条件
• 仿真结果为以后的设计改进提供指导
其他应用场景
◀ 上台阶机器人分析
ㆍ防止机器人摔倒的控制器设计
ㆍ选择机器人驱动所需的电机容量
◀ 如何基于RecurDyn/TrackLM建立履带车辆模型实例
ㆍRecurDyn/TrackLM (Track Low Mobility) gives the ability to simulate construction-style tracked vehicles.
ㆍThe toolkit supports the easy creation of sprockets, rollers, idlers and link.
ㆍAlso, graphical design of sprocket teeth profile and grouser of the track link is supported.

