
{{ post.title }}
글 편집
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
 下面我们来看一下RecurDyn提供的各种力和扭矩。
下面我们来看一下RecurDyn提供的各种力和扭矩。
请打开下面的每个感兴趣的项目以查看详细信息。
弹簧和阻尼器模型
弹簧是一种机械元件,当外力作用时,弹簧可以被压缩或拉伸,当外力作用时,由于弹簧的弹性,弹簧可以恢复到原来的形状。这些弹簧可以根据形状和材料成为螺旋弹簧,片簧,发条弹簧,橡胶弹簧,空气弹簧,液压弹簧等各种弹簧。阻尼器是吸收振动能量的装置,也被称为除振器或减速机。如下图所示,在汽车或火车的车轮和车身之间的悬架系统中,弹簧和减震器一起使用,以吸收来自路面的振动,并减弱对车身或乘客的冲击。

(1) 平移弹簧和阻尼器
图9.4 平移弹簧和阻尼力元件
图中显示了物体i和物体j之间由平移弹簧-阻尼力元件进行连接的状态。当由弹簧连接的两个物体受到外力的影响发生移动时,弹簧-阻尼器的长度会发生变化,关于此长度的位移,根据弹簧-阻尼器的自弹性(刚度)和阻尼力,会产生使弹簧恢复到初始长度的恢复力和缓冲外力的阻尼力。以这种方式产生的恢复力和阻尼力会分别作用在两个物体上,使得两个物体通过弹簧发生移动。
平移弹簧-阻尼器的力方程如下所示由弹簧的长度位移,弹簧刚度系数(Stiffness Coefficient)和阻尼系数(Damping Coefficient)计算出平移弹簧阻尼器的力。

计算出的力f_s根据作用力和反作用力的原则,如下图所示,各个弹簧力被施加到物体i和物体j,弹簧力被转换成广义力Q_i和Q_j并带入运动方程。

平移弹簧和阻尼力的计算

(2) 平移弹簧的创建方法
弹簧的创建方法如下图顺序所示,单击弹簧图标后,选择创建选项,按顺序选个两个物体,然后单击要创建弹簧的两个点。在两个输入点处自动创建两个标记,并且这两个标记分别属于两个物体,在分析期间,通过测量两个标记的长度来计算弹簧位移并从该位移计算弹簧力。此外,通过打开生成的弹簧的属性(Property)对话框,修改弹簧的刚度系数(Stiffness Coefficient),阻尼系数(Damping Coefficient)和其他必要参数,并关闭对话框,可以分析应用该参数的弹簧动力学建模。在这种情况下将弹簧的自由长度(Free Length)基本上定义为创建弹簧时两个标记之间的值,如果希望在弹簧压缩/张力的情况下进行建模,则可通过将自由长度修改为比两个标记之间的距离 (Distance between Two Markers)更长来对压缩弹簧进行建模,相反,如果自由长度小于两个标记之间的长度,可以对张力弹簧进行建模。
 平移弹簧的创建方法
平移弹簧的创建方法
A. 一般力 (General Force)
(1) 平移弹簧阻尼器 (Translational Spring Damper)
平移弹簧是最常用的力元件,它是指通过将弹簧钢的圆形钢材料与线圈一起缠绕而制成的机械元件。这种弹簧是当受到外部施加的力扭转时产生变形,它可以利用弹性吸收或储存能量,并利用这些能量恢复到原来的形状。弹簧广泛应用于汽车悬架和床垫弹簧等。
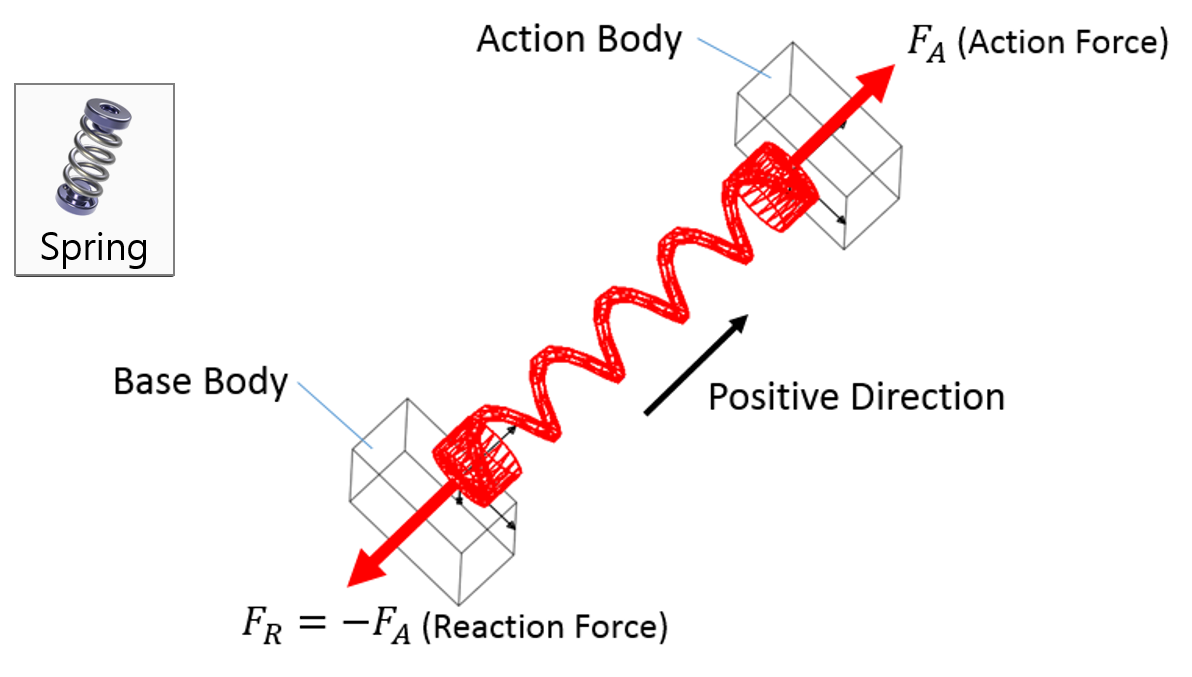
平移弹簧阻尼器
(2) 旋转弹簧阻尼器 (Rotational Spring Damper)
旋转弹簧是将弹簧钢缠绕成螺旋形状而产生的机械元件。它也被称为螺旋弹簧。它通过将自身缠绕成螺旋形来储存弹性能量,利用储存的能量恢复到原来的形状。
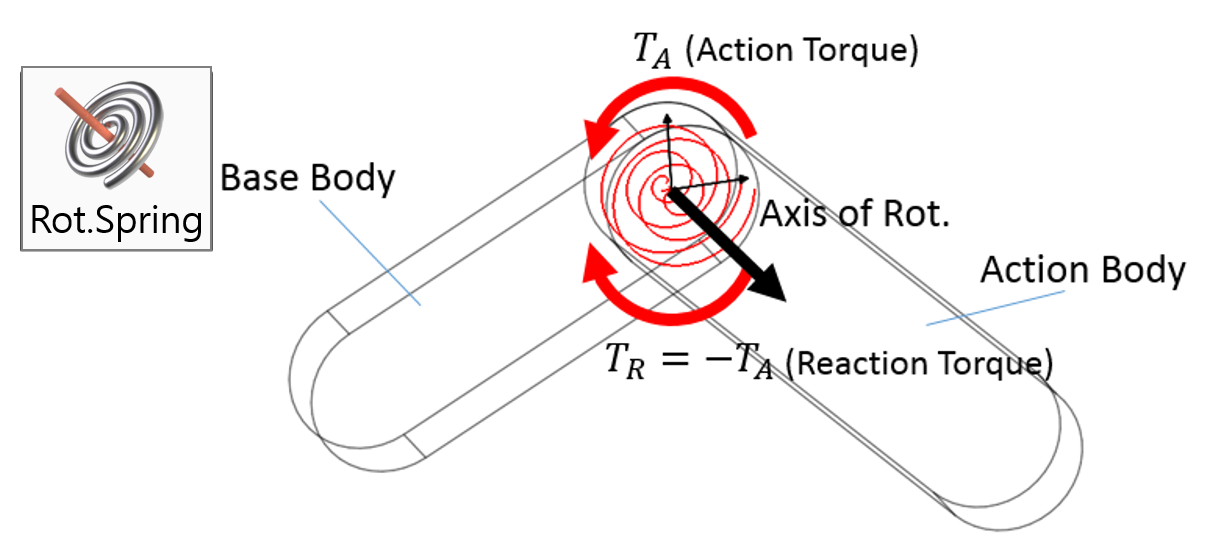
旋转弹簧阻尼器
(3) 轴向力 (Axial Force)
轴向力是将两个物体的两个点连接成一条直线,并将两个点的作用力和反作用力定义为时间的函数(方程式)的力元件。
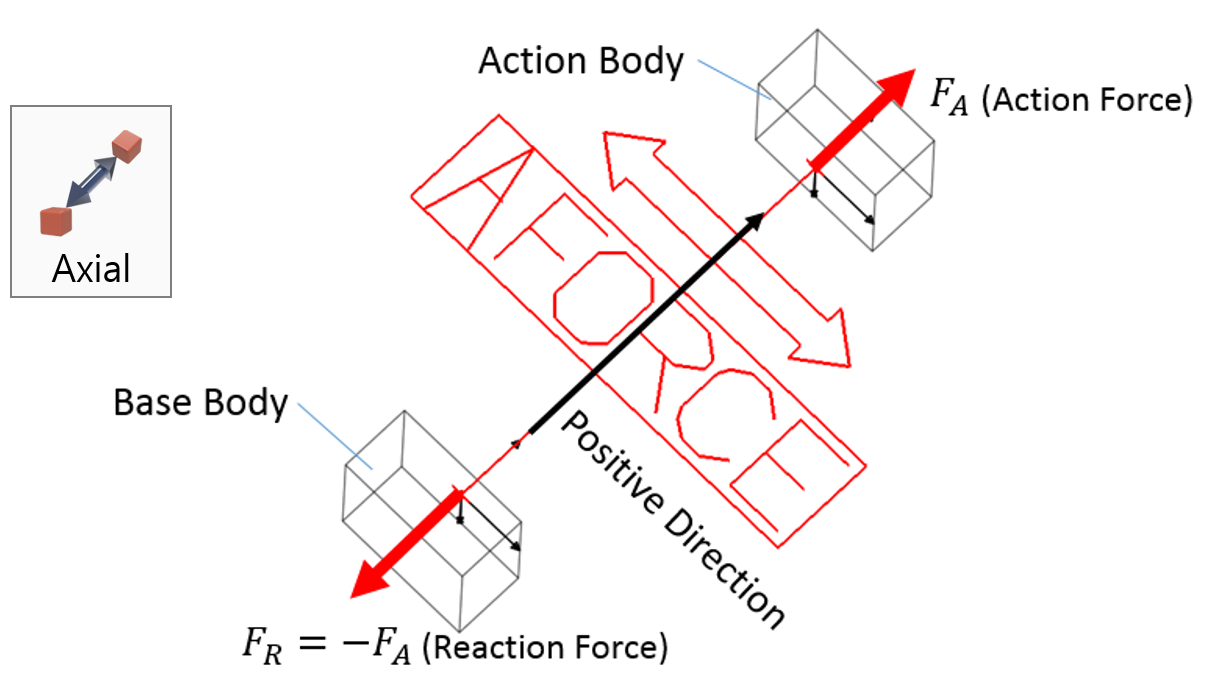
轴向力
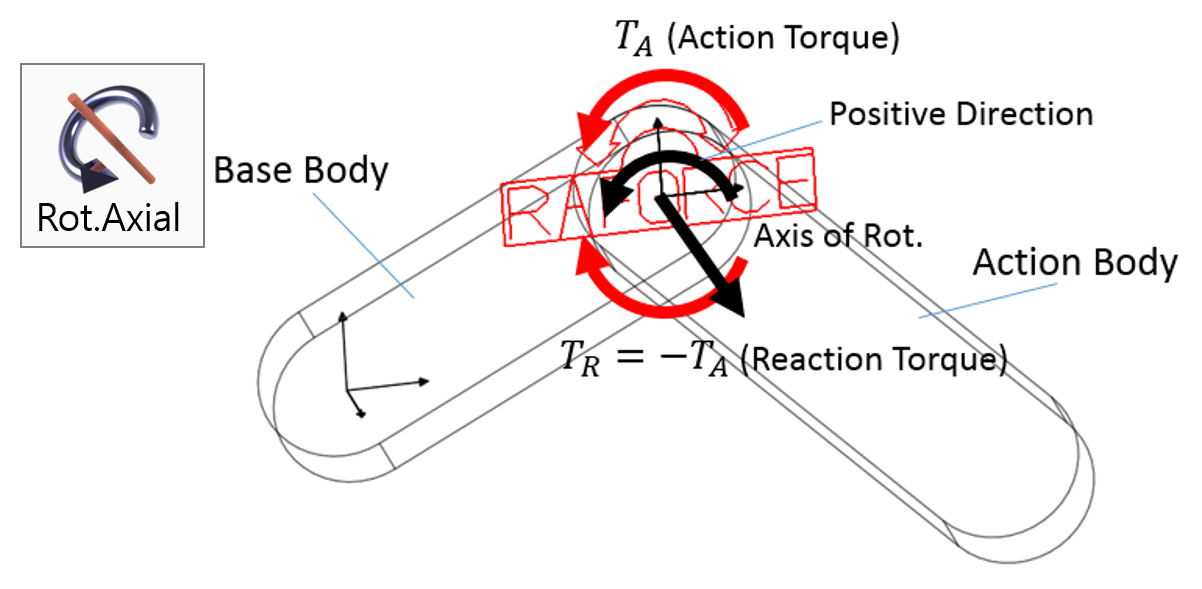
(4) 旋转轴向力 (Rotational Axial Force)
旋转轴向力是相对于两个物体之间限定的旋转轴,将作用扭矩和反作用扭矩定义为时间的函数(方程式)的力(扭矩)元件。
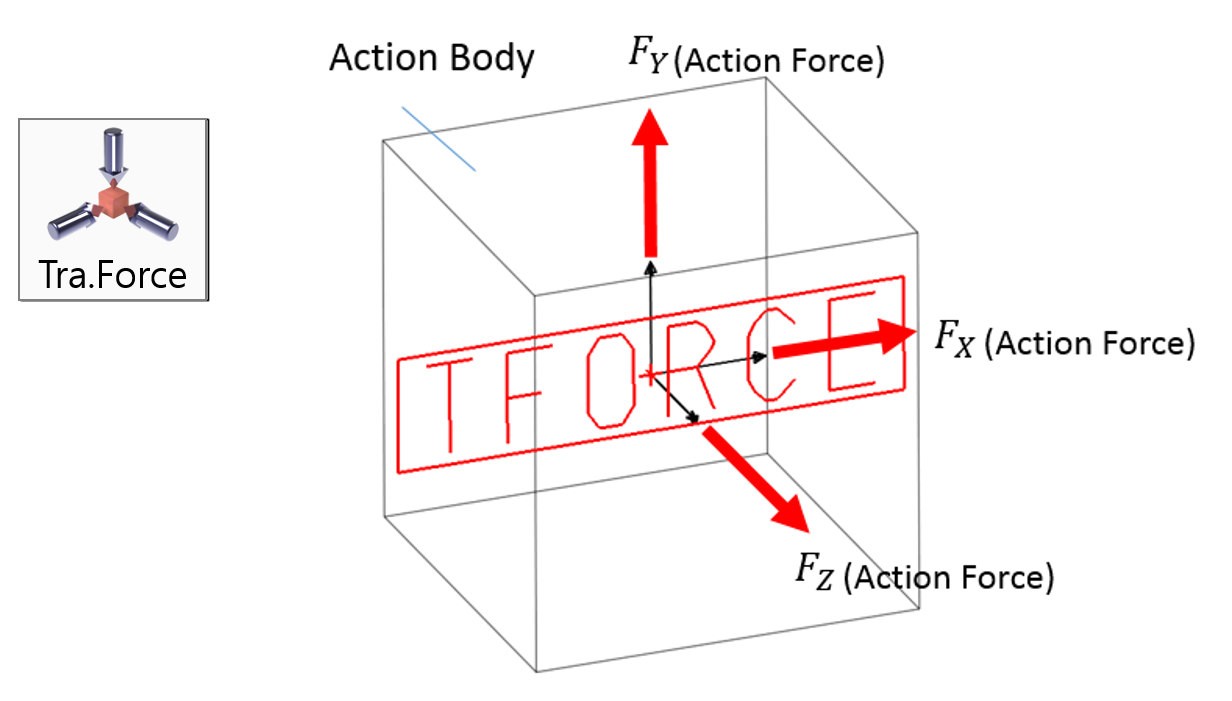
(5) 平移力 (Translational Force)
平移力是可以在定义的物体中将三个平移方向X,Y,Z轴上的每个力定义为时间的函数(表达式)的力元件。另外,由于用户可以修改力的作用方向的参考系,因此可以考虑物体的运动来施加力。
平移力
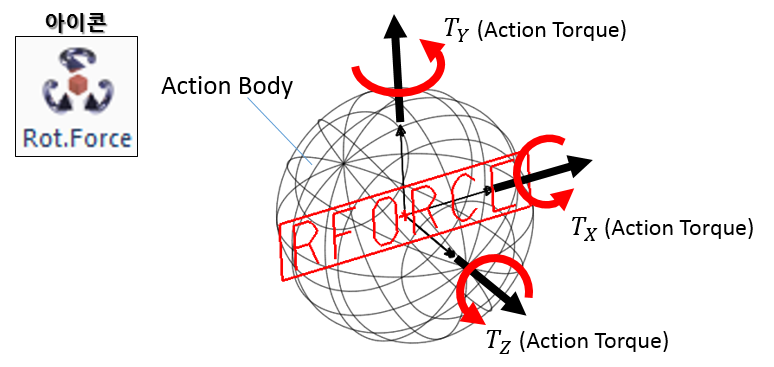
(6) 旋转力 (Rotational Force)
旋转力是可以将限定物体中的三个旋转轴中的每一个扭矩定义为时间的函数(表达式)的力(扭矩)元件。

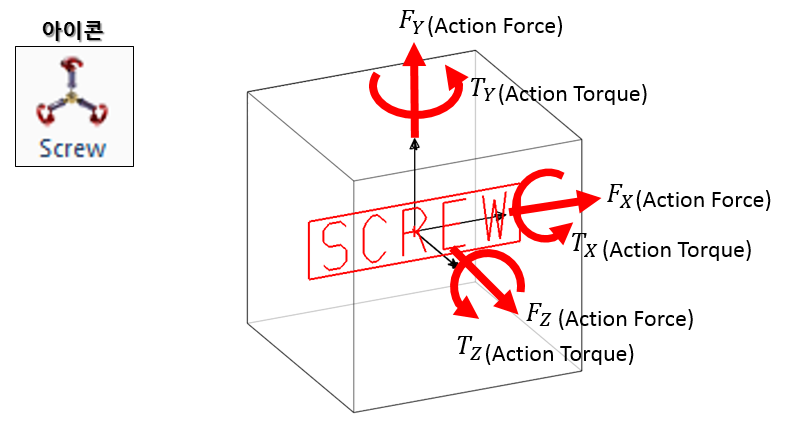
(7) 螺旋力 (Screw Force)
螺旋力是可以在限定物体的6个方向3个平移方向3个旋转轴上将平移力和扭矩定义为时间的函数(表达式)的力元件。

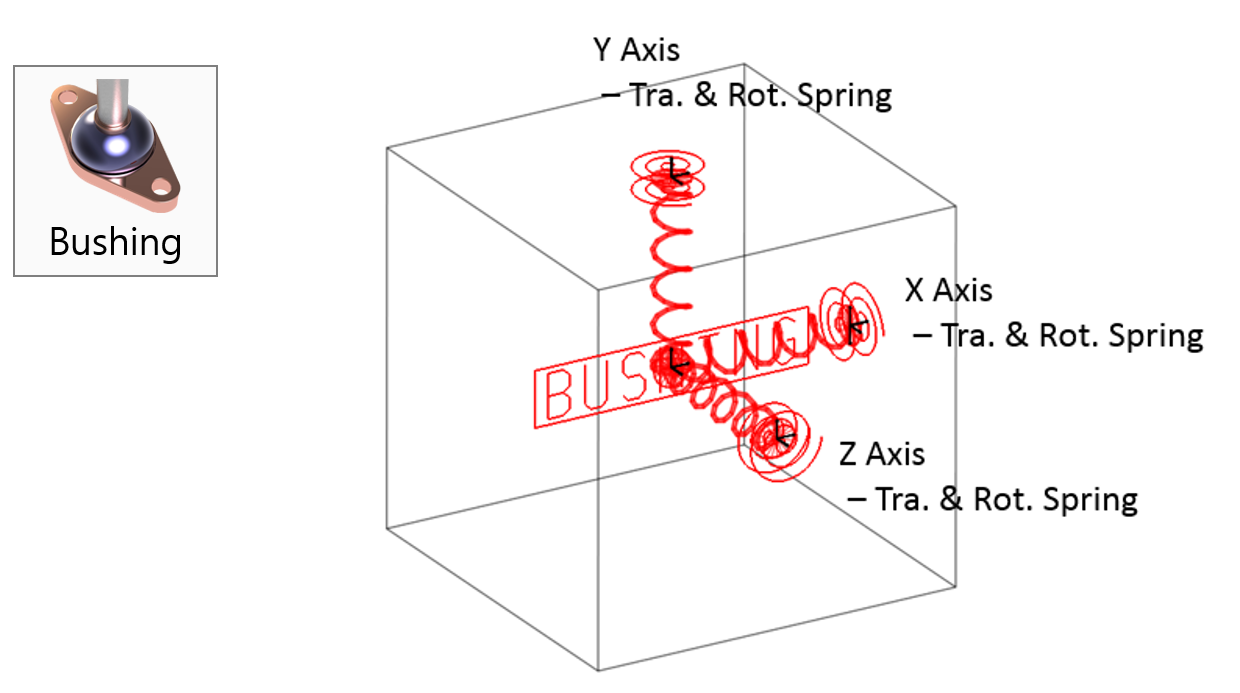
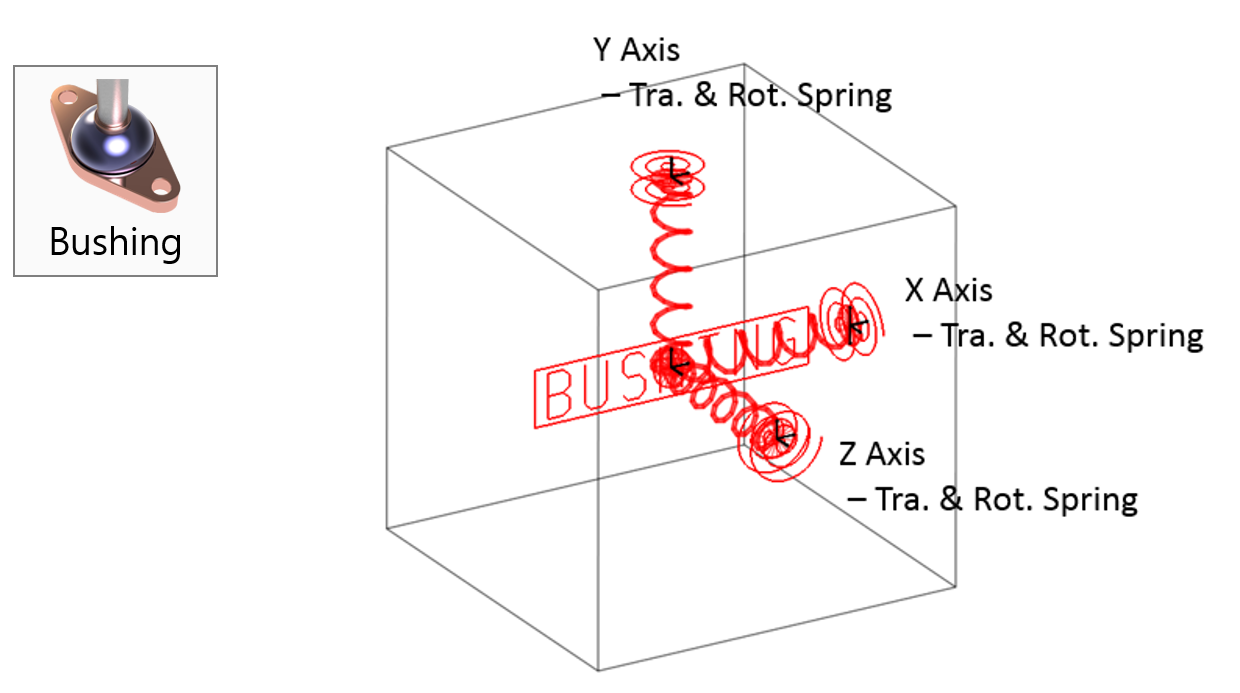
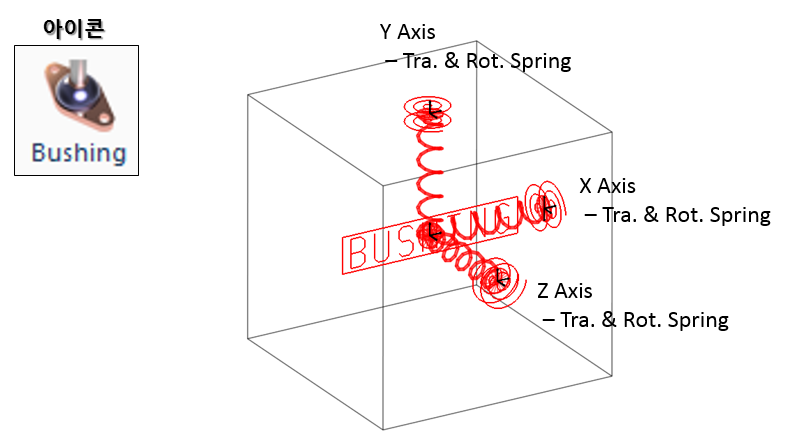
(8) 衬套力 (Bushing Force)
衬套力作为在限定位置上产生所有6个自由度的平移/旋转弹簧的力元件,是可以达到将两个物体附着到一个点的效果的力元件。
B. 特殊力
(1) 矩阵力 (Matrix Force)
矩阵力是用户可以直接定义限定的两个物体之间的力元件上的刚度矩阵的力元件。此功能允许用户任意使用矩阵力。例如,轴承模型可以通过6轴的刚度矩阵获得,然后输入到矩阵力的刚度矩阵,并可以通过利用具有轴承特性的刚性力元件建模来生成各种力元件。
矩阵力是用户可以直接定义限定的两个物体之间的力元件上的刚度矩阵的力元件。此功能允许用户任意使用矩阵力。例如,轴承模型可以通过6轴的刚度矩阵获得,然后输入到矩阵力的刚度矩阵,并可以通过利用具有轴承特性的刚性力元件建模来生成各种力元件。
(2) 梁力 (Beam Force)
梁力允许你使用一个关于两个物体之间的梁力的方程,使两个物体的行为就像它们之间有一个梁一样。为此,用户输入杨氏模量,剪切模量和梁截面的形状信息和面积矩信息,并对梁进行分析。
梁力允许你使用一个关于两个物体之间的梁力的方程,使两个物体的行为就像它们之间有一个梁一样。为此,用户输入杨氏模量,剪切模量和梁截面的形状信息和面积矩信息,并对梁进行分析。
(3) 板力 (Plate Force)
板力是将诸如shell之类的行为的力公式应用于四个物体的力元件。为此,用户必须输入杨氏模量,泊松比率和厚度等信息。
板力是将诸如shell之类的行为的力公式应用于四个物体的力元件。为此,用户必须输入杨氏模量,泊松比率和厚度等信息。
(4) 轮胎力 (Tire Force)
轮胎力是包含轮胎公式以模拟汽车的轮胎动态行为的力元件。现在支持广泛使用的Fiala,UA轮胎公式模型,也支持允许用户进行公式定义的User轮胎。
轮胎力是包含轮胎公式以模拟汽车的轮胎动态行为的力元件。现在支持广泛使用的Fiala,UA轮胎公式模型,也支持允许用户进行公式定义的User轮胎。

{kind=link}
{kind=link}
{kind=link}