
{{ post.title }}
글 편집
{{ post.author.name }}
完成日期
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
下面我们来看一下RecurDyn提供的各种运动副。
请打开下面的每个感兴趣的项目以查看详细信息。
A. 一般运动副
(1) 固定副
固定副是一种具有将两个物体固定到用户定义的位置的约束条件的运动副。固定副图标是由螺栓等固定工具固定物体和物体的运动副,所以没有可移动的自由度,所有的自由度受到限制。

固定副
(2) 旋转副
旋转副是一种将两个物体在定义的一个点上固定并可以绕一个指定的旋转轴进行旋转运动的运动副。为了定义两个物体固定在空间中的一个点的三维位置条件表达式和旋转轴,将两物体各自定义的向量彼此平行的并行条件表达式定义为约束条件表达式。 因此,旋转副限制了两物体之间的位置和旋转相关的共5个自由度,这意味着两个物体之间只有一个旋转自由度。另外,旋转副相对于旋转轴的旋转自由度可以以时间函数的形式表示并且受到运动约束的约束。
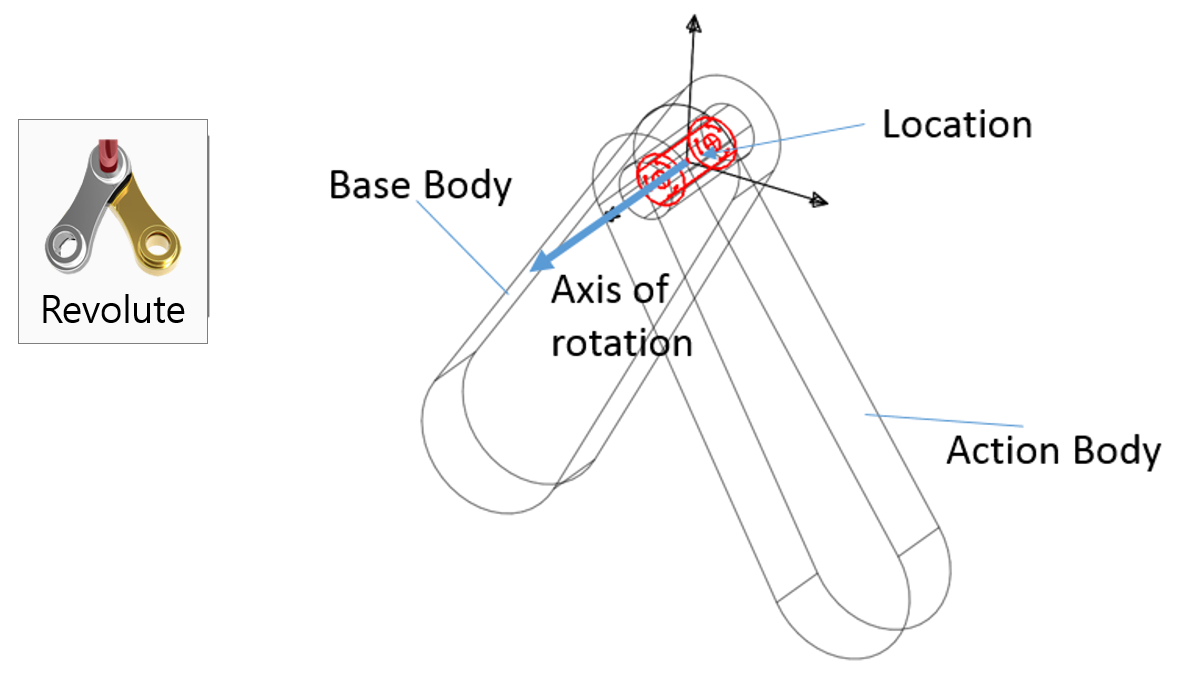
旋转副
(3) 平移运动副
平移运动副是一种两物体之间在指定的向量的方向可以进行平移运动的运动副。所有方向的旋转运动都受到约束,并且只有指定向量方向的平移运动时可能的,只有一个平移自由度,剩余的五个自由度都受到约束。另外,平移运动副所包含的平移自由度可以以时间函数的形式表示并且受到运动约束的约束。

平移运动副
(4) 平面运动副
平面运动副是一种只允许在指定的平面上滑动并围绕平面的垂直旋转轴进行旋转运动的运动副。

平面运动副
(5) 圆柱形运动副
圆柱形运动副是一种可以相对于两个物体之间的指定旋转轴同时进行平移和旋转的运动副。另外,可以将表示自由平动和旋转的自由度作为时间函数来约束两个物体的运动。
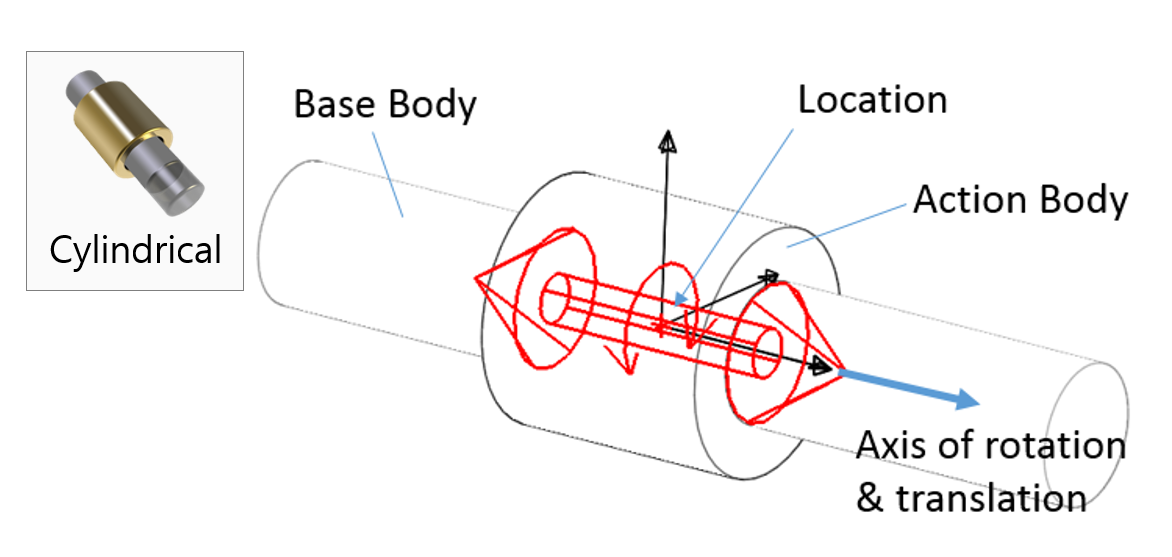
圆柱形运动副
(6) 球形运动副
球形运动副是一种将两个物体固定在指定的一点并且可以在任意的方向上旋转的运动副。

球形运动副
(7) 螺旋运动副
螺旋运动副是一种相对于两物体之间指定的旋转轴在定义的每个节距可以旋转360度的运动副。
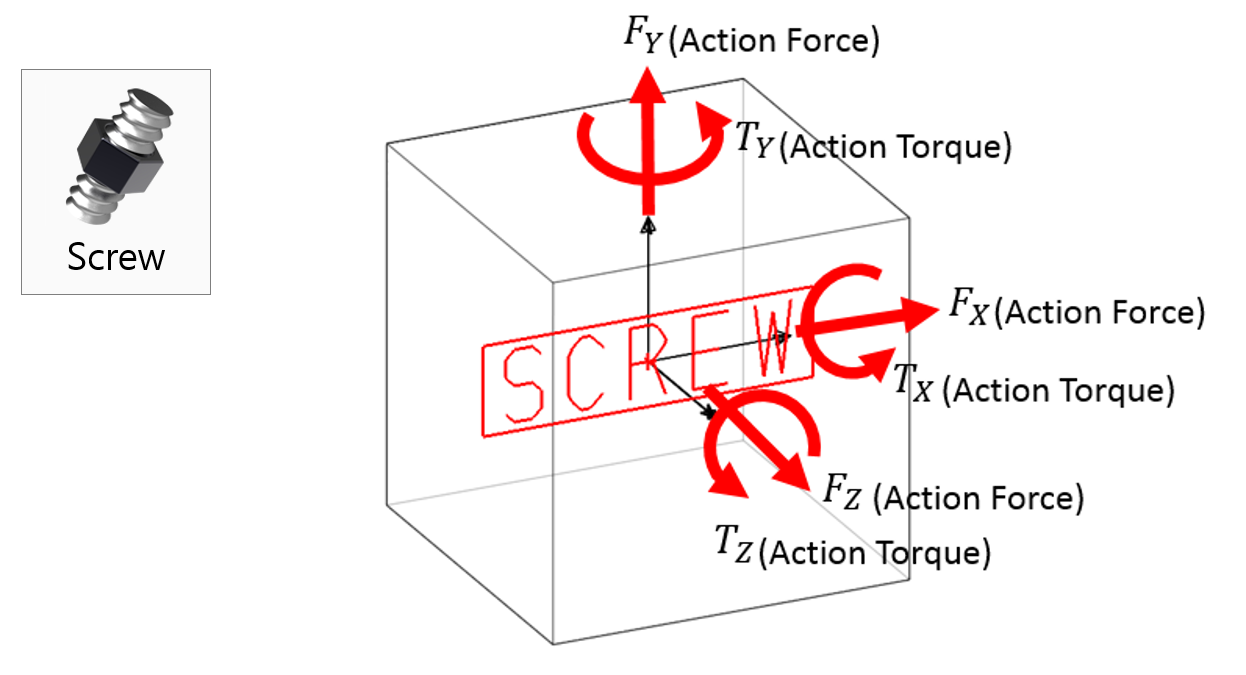
螺旋运动副
(8) 万向运动副
万向运动副是一种如图所示通过正交旋转轴传递两个物体的相对旋转的运动副。

万向运动副
(9) 恒速
恒速是一种能够在两个物体的旋转轴上保持恒定速度的运动副。

Constant Velocity
B. 原始运动副
原始运动副如下表所示提供共8个原始运动副。每个运动副都匹配它们的特征定义两个坐标系之间的约束方程。这些原始运动副有以下优点:用户可以同时使用不同的原始运动副来建立你想要的约束方程。
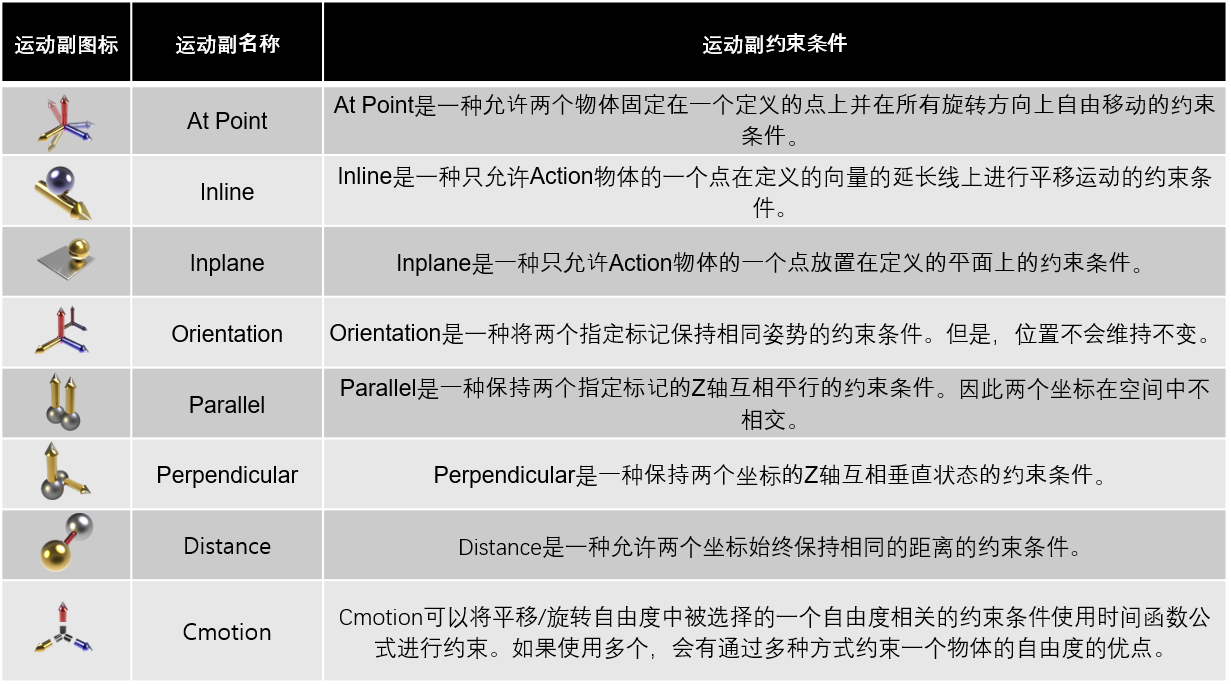
原始运动副
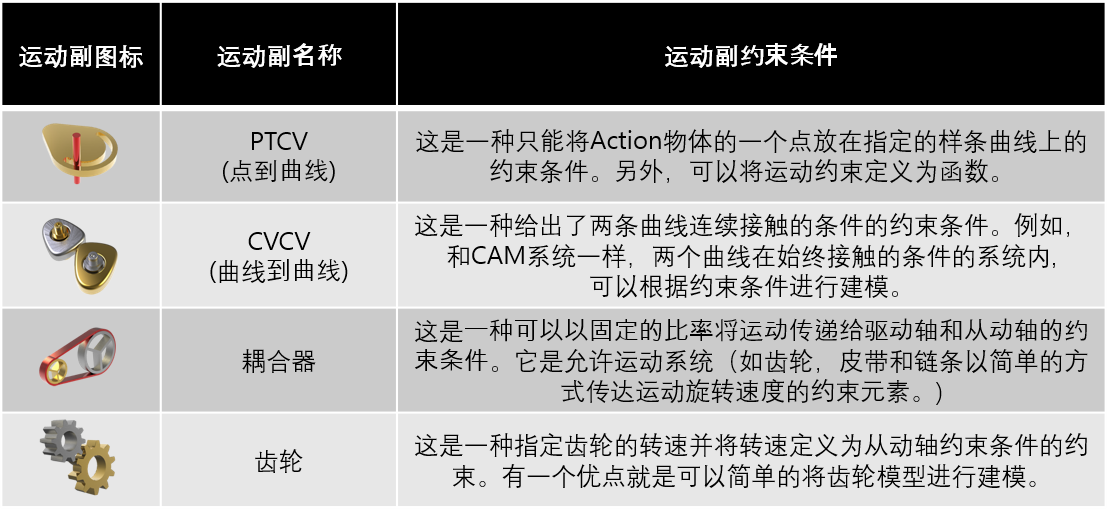
C. 特殊运动副
特殊运动副可以提供特殊约束类型的运动副元素。
根据运动副类型的自由度
※ 根据运动副类型的自由度

