{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
작성일
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
RecurDyn에서 PID제어를 활용한 동역학 모델링 방법에 대하여 알아보도록 하겠습니다.
RecurDyn에서는 CoLink라는 Toolkit을 이용하여 제어모델을 생성하고 RecurDyn의 동역학 모델과 연결하여 해석할 수 있습니다.
'Run CoLink'를 실행하면 아래와 같이 CoLink가 실행되고 블럭모델링으로 제어모델을 생성할 수 있습니다.

그럼 예제를 통해 RecurDyn의 동역학 모델링에서 CoLink의 제어를 활용해 보도록 하겠습니다. (PID 제어)
아래 모델은, 기울기를 가지는 지면위를 x축 방향 (그림에서 오른쪽 방향)으로 등속병진운동 하는 모델입니다. 지면과 Sphere 사이에 접촉이 정의되었고, 마찰도 적용됩니다.
단순히 Sphere에 등속회전을 적용하면 접촉의 마찰력 때문에 전체적인 Sphere의 병진속도는 일정하지 않을 수 있습니다.
이 모델에 CoLink를 연결하여 PID 제어를 활용하면 , Sphere의 병진속도를 피드백 받고 Sphere를 회전시키는 회전토크를 조절하여 등속병진운동이 가능하게 됩니다.
아래 모델링 절차를 참고하시기 바랍니다.
<RecurDyn에서 CoLink제어를 위한 모델링>
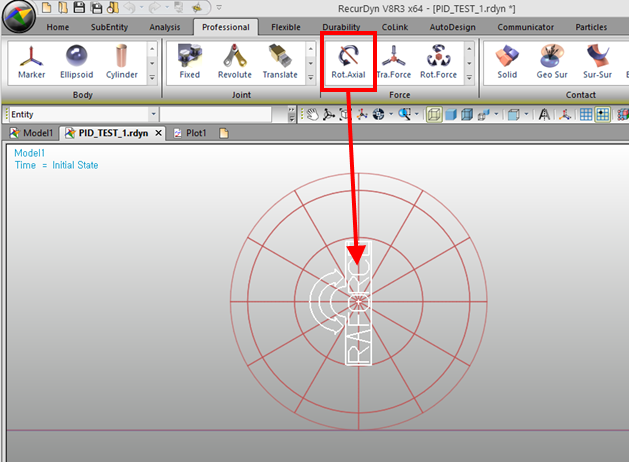
1. Sphere에 Rotational Axial Force를 정의합니다.
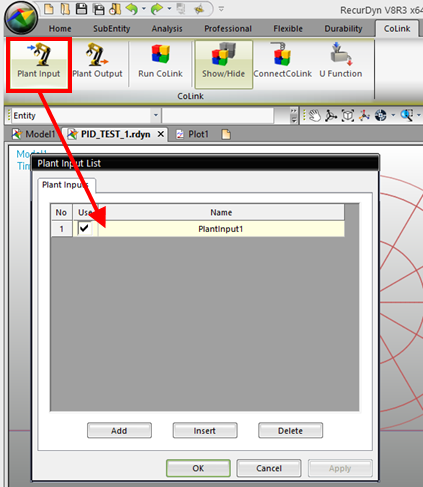
2. Plant Input 정의
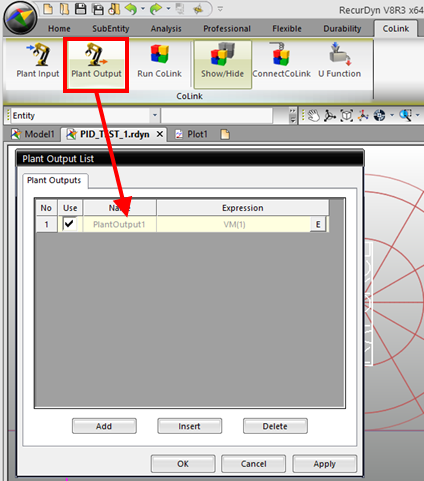
3. Plant Output 정의
Expression으로 정의 가능하며, 본 예제에서는 Sphere Body의 속도를 Output으로 정의하기 위해 VM()함수를 사용하였습니다.
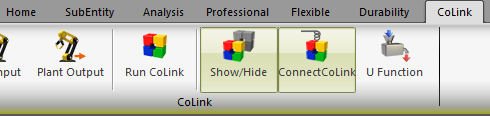
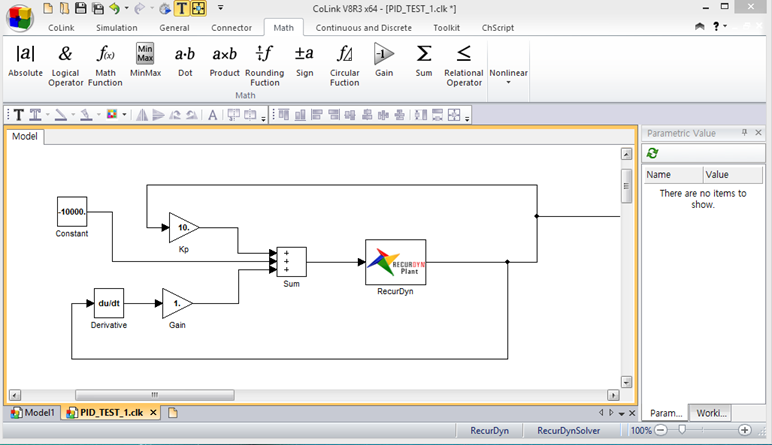
4. CoLink 모델링 및 해석
ConnectionCoLink를 클릭하여 활성화하고 'Run CoLink'를 클릭하여 CoLink에서 아래와 같이 제어모델링 진행. 본 예제에서는 PD 제어만 사용하였습니다. (PID 제어에서 I를 사용하지 않음)
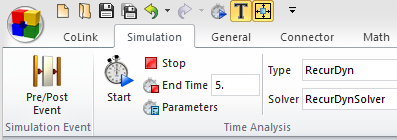
5. 시뮬레이션 진행
PID 제어 모델링까지 완료되면 CoLink의 Simulation 탭에서 Start 버튼을 클릭하여 해석을 진행할 수 있습니다.