
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
작성일
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.tutorial.upload_filename }} | Attached File | {{ post.file.upload_filename }} |
무유도 다연장 로켓의 발사초기 동적 거동
<고객정보>
• 고객명 : ㈜한화
• 주요사업 : 화약사업, 방산사업, 기계항공사업등
<과제>
• 다연장 무유도 로켓발사 시탄의 초기 거동 분석
<사용된 제품>
• RecurDyn/Professional
• RecurDyn/AutoDesign
<효과>
• MonteCarlo 방법을 기반으로 가장 만족할 수준의 설계 변수 도출
• 탄 초기 거동에 대한 설계변수의 민감도 확인
• 향후 발사대 진동 데이터와 간접 비교를 통해 시뮬레이션의 신뢰성 확인
==========================================================================
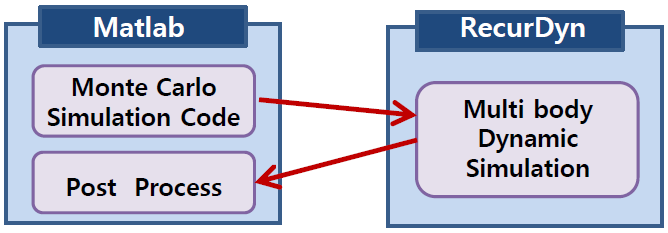
범위한 지역의 적 타격이 가능한 무기체계인 차기 다련장의 탄종에는 유도, 무유도 이렇게 두 종류가 있으며, 본 사례에서는 다물체 동역학 시뮬레이션을 기반으로 MonteCarlo 방법과 Batch 모드를 활용하여 다연장 무유도 로켓발사 시탄의 초기 거동을 분석하였습니다.
분석에서는 무유도 로켓 발사 시 발사대의 진동에 의해 탄의 초기 거동의 변화와 이에 따른 탄착 정밀도의 영향을 고려하였으며, 연속 발사 동특성을 파악하였습니다. 또한, 설계변수와 운용조건을 고려하여 탄의 초기거동(Pitch, Yaw)을 고려하여 분석하였습니다.
Case Study
1) 모델링
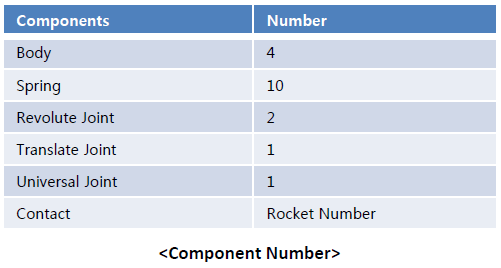
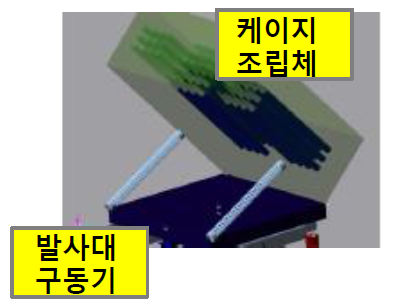
모델링에서는 발사대와 차량, 로켓, 방위각 구동부를 강체로 가정하고, 추력의 틀린 배열은 고려하지 않았습니다. 또한, 차량 현가장치를 고려하지 않았으며, 지지잭과 고각 유압잭을 높은 강성의 스프링 요소로 가정하고, 발사대 진동요소를 탄 후류에 의한 압력으로 가정하였습니다.

» 탄추력
체추력데이터를Spline으로Import하였으며,추력Expression은AKISPAL(time-발사대안정화시간,0,Sp1,0)을사용하였습니다.
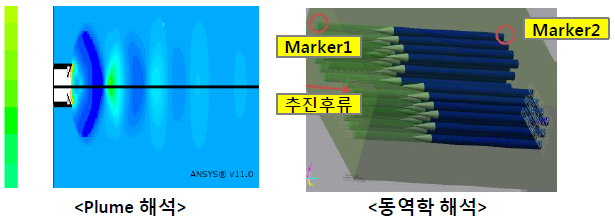
» 탄추진후류
Plume해석으로 얻은 압력 값을 집중 힘으로 환산하여 적용하였으며, 탄 추진 후류 Expression으로 IF(DZ(1,2,1):0,0,탄추진후류)-if(DZ(1,2,1)-(탄추진후류유효거리:0,0,탄추진후류)를 사용하였습니다. 참고로, 이 식에서 1은 Marker1을 의미하고, 2는 Marker2를 의미합니다.
2) 설계변수와 운용조건
» 설계변수와 운용조건 설정
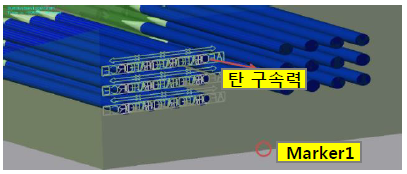
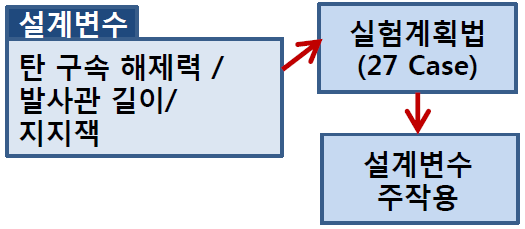
탄 초기 거동에 영향을 미칠 수 있는 설계변수와 운용조건을 선정하고 변수화 하였습니다. 설계변수는 탄 구속 해제력, 발사관 길이, 지지잭을 의미하며, 운용조건은 고각, 방위각, 발사간격을 의미합니다.
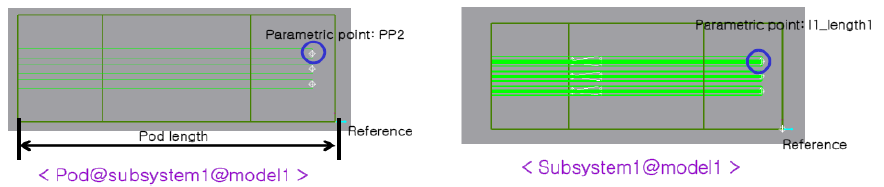
» 설계 조건 변수화 (발사관 길이)
Parametric Point, Parametric Value, Expression, Parametric Point Connector를 활용하였습니다.

{kind=link}
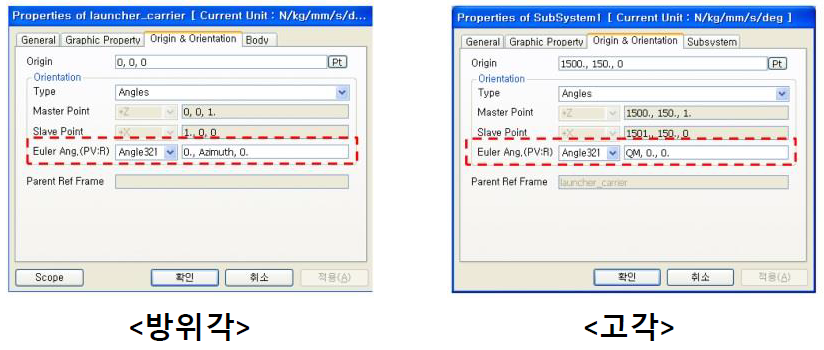
» 운영 조건 변수화 (고각, 방위각)
ㆍ 방위각: 케이지 조립체를 발사대 구동기의 Subsystem으로 지정하였으며, 발사대 구동기가 구동되면 케이지 조립체도 같이 회전시키도록 하였습니다. 또한, Euler Angle을 Parameter value(PV:Azimuth)로 지정하였습니다.
ㆍ 고각: Euler Angle을 Parameter value(PV:QM)로 지정하였습니다.

{kind=link}
3) 진행과정
» 시뮬레이션 결과
탄의 Pitch Rate, Yaw Rate를 확인하여 발사대 진동 참고데이터로 활용하였습니다.
» 설계변수 영향 분석
3수준 완전배치법, 실험계획법으로 설계변수의 주작용 확인하였습니다.
» 운용조건을 고려한 설계변수 영향 분석
실험계획법, 완전배치법에 Monte Carlo 시뮬레이션을 각각 적용하였습니다.
{kind=link}

효과
본 사례는 무유도 다연장 로켓의 발사 초기의 동적 거동을 분석 하여 Monte Carlo 방법을 기반으로 가장 만족할 수준의 설계변수를 도출하고 탄 초기 거동에 대한 설계벼수의 민감도를 확인하였습니다. 또한, 본 사례를 통해 향후에 발사대 진동데이터와 간접 비교를 통해 시뮬레이션의 신뢰성을 확인할 수 있음을 알 수 있었습니다.
* 본 내용은 2010 RecurDyn User’s Conference 발표 자료를 재구성한 것입니다.