
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
작성일
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |

Multi-Body Dynamics software Tightly integrated
into ANSYS® Workbench™
MBD for ANSYS (Multi-Body Dynamics for ANSYS) is an add-on module for ANSYS that is used to simulate the transient behavior of a mechanical assembly in motion and is developed by FunctionBay, Inc.
“An efficient approach to understand the overall dynamic behaviorand generate boundary conditions for structural analysis.”
Applications of MBD for ANSYS
본 글에서는 자동차에 사용되는 클러치 (Clutch)모델을 이용하여. 플라이 휠로부터 인풋샤프트로 동력이 전달되는 메커니즘에 대해 시뮬레이션을 수행합니다.
클러치 모델에는 다이어프램 스프링 (flexible diaphragm spring)을 유연체로 모델링 하는 대신, 강체 바디 모델과 선형 스프링을 이용하여 시뮬레이션을 수행합니다. 그 후, 선형 스프링 대신 비선형 스프링 요소를 사용함으로써 보다 정확한 결과를 얻는 방법에 대해 소개합니다.
1. 모델 정보
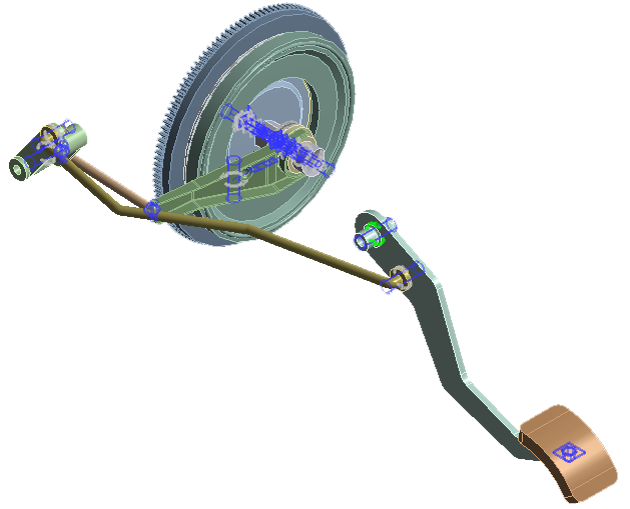
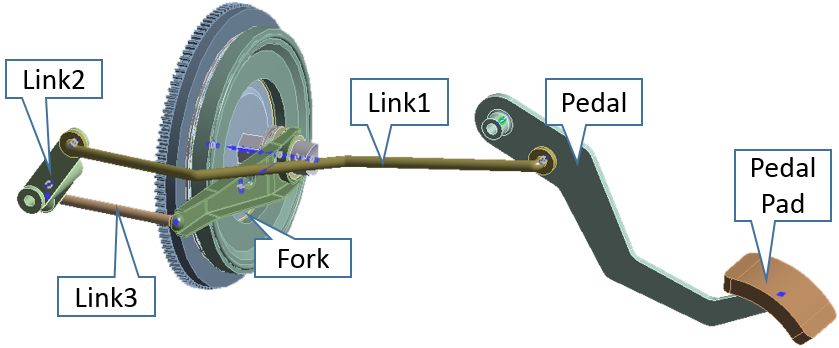
아래와 같은 클러치에서, 페달의 동작에 의해 포크(Fork)가 앞뒤로 움직이게 됩니다.
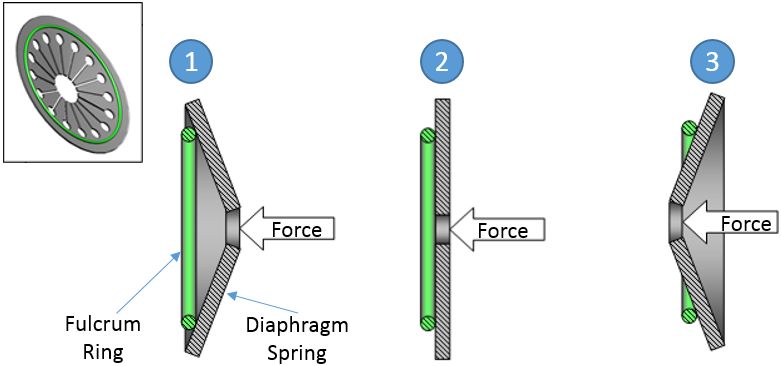
포크가 앞뒤로 움직이면서 다이어프램 스프링을 눌렀다 떼게 되는데, 이 때 다이어프램 스프링으로부터 힘이 작용하게 됩니다. 이를 표현하기 위해서는 다이어프램 스프링을 유연체로 모델링 해야 하지만, 여기서는 선형 스프링 요소를 사용할 것입니다.
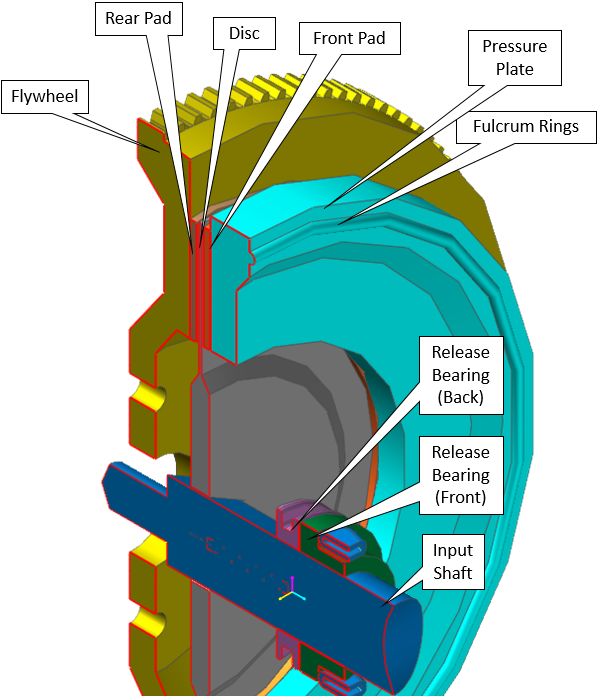
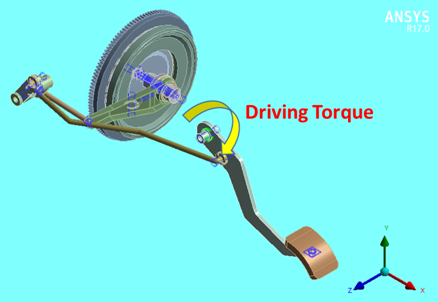
플라이휠은 엔진으로부터 토크를 전달받습니다. 그리고 클러치가 결합되면 이 토크가 인풋샤프트로 전달되는데, 클러치의 결합 여부는 앞서 설명한 페달의 동작을 통해 결정됩니다. 이 결합과 관련된 동작에서 다이어프램 스프링이 중요한 역할을 합니다.
2. 모델링 ( 선형 스프링 )
여기서 사용되는 예제 모델은 동역학 해석과 선형/비선형 스프링의 활용에 대한 교육 목적을 위해 간략화된 클러치 모델입니다.
이 모델은 다음과 같은 요소들을 포함하고 있습니다.
14개의 강체
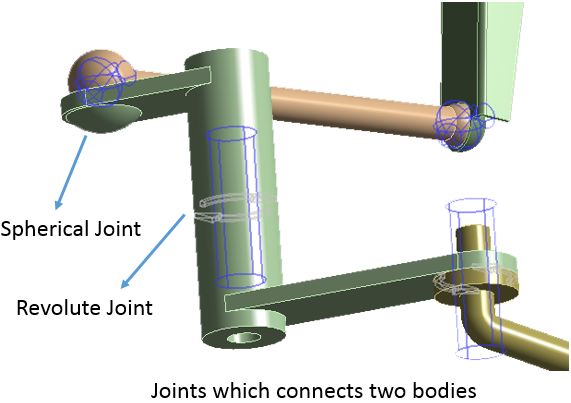
16개의 조인트와 1개의 커플러
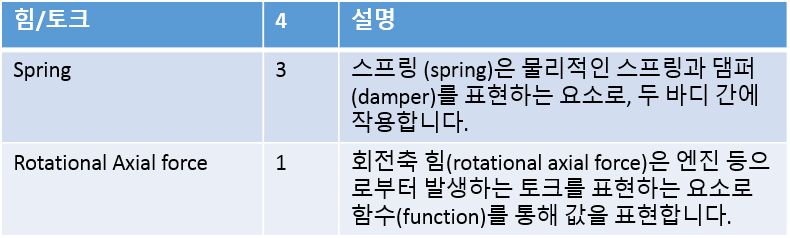
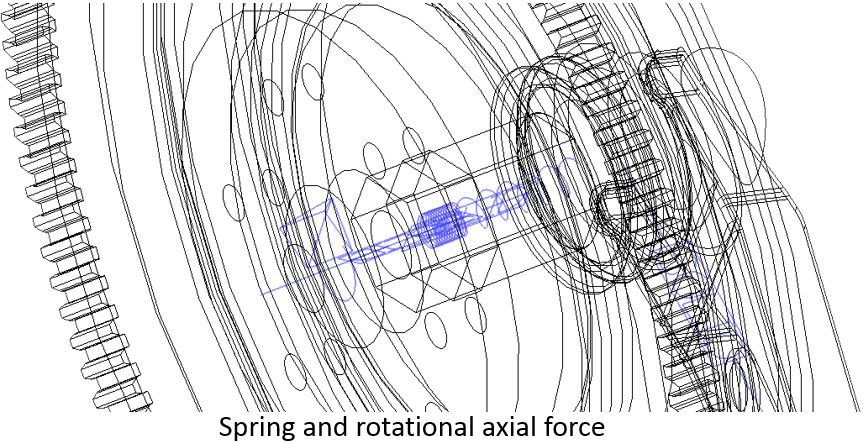
4개의 힘 (혹은 토크)
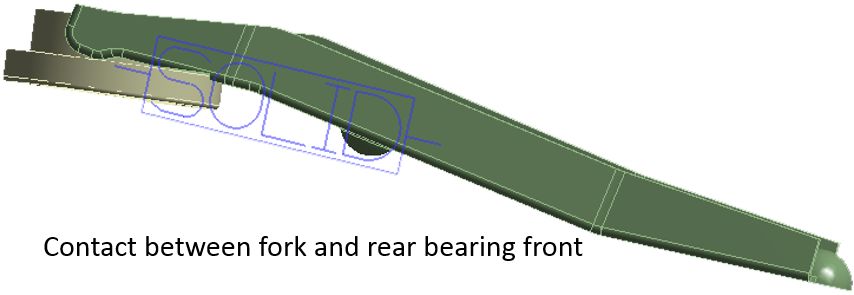
3개의 접촉


이렇게 모델링 된 Clutch Model은 다음과 같습니다.
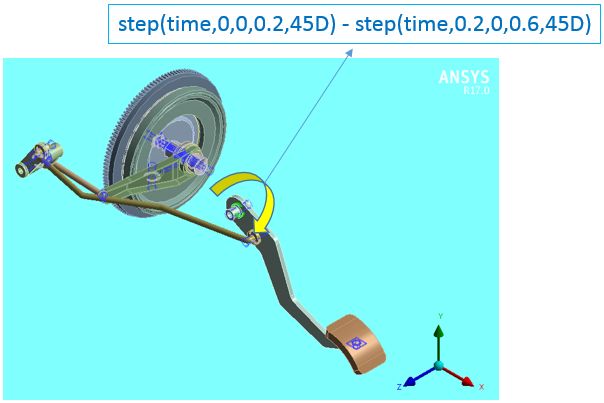
여기서는 Pedal을 45도만큼 밟았다가 다시 떼는 형태로 모델링 되었으며, 이는 Revolute1_rev_pedal에 다음과 같은 수식을 주어 Revolute joint가 시간에 따라 움직이게 하였습니다.
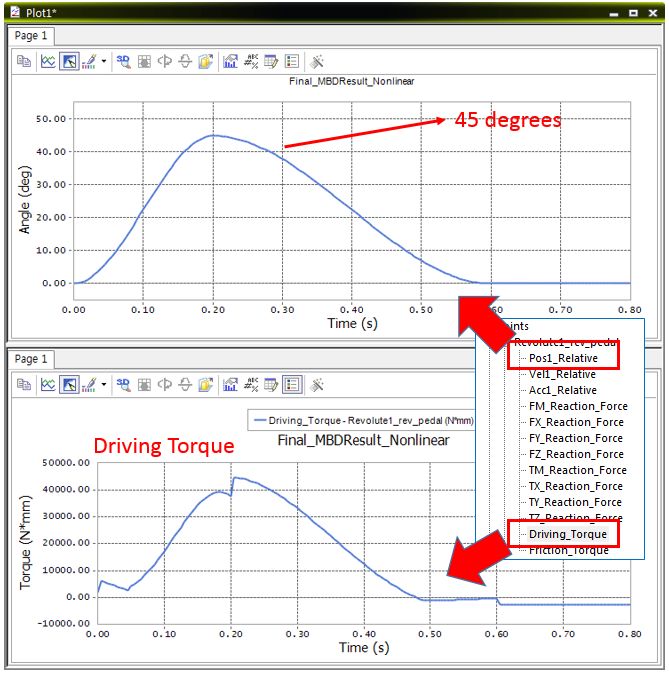
이를 시뮬레이션한 결과는 다음과 같습니다.
Plot을 통해 Pedal을 45도만큼 밟았다가 떼는 조건으로 해석된 결과를 확인할 수 있습니다. (Revolute1_rev_pedal의 회전각도를 통해 확인이 가능합니다.)
또한 Pedal을 이와 같은 조건으로 움직이기 위해 필요한 Torque의 크기는 Revolute1_rev_pedal의 Driving_Torque항목을 통해 확인이 가능합니다.
3. 모델링 (비 선형 스프링 )
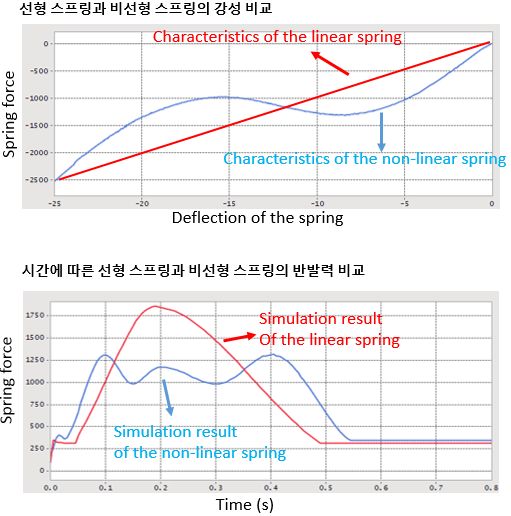
여기까지는 단순한 선형 스프링, 즉, K가 상수일 때를 가정한 시뮬레이션이었습니다. 하지만 다이어프램 스프링은 실질적으로 비선형적인 강성을 갖는 스프링입니다. MBD for ANSYS는 이와 같은 비선형 특성을 갖는 스프링을 모델링 하는 것도 지원합니다. 만일 다음과 같은 비선형 스프링의 변화량과 스프링의 반발력간의 관계에 대한 데이터를 이미 갖고 있다고 합시다.
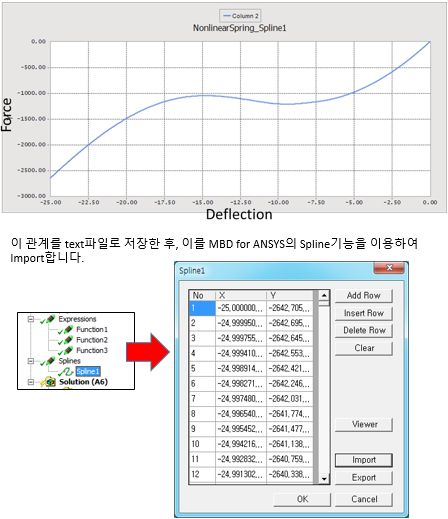
비선형 스프링을 사용하기 위해 앞서 사용했던 선형 스프링 대신, axial force를 생성하고, 여기에 작용하는 힘을 다음과 같은 함수(function)로 정의합니다.
-AKISPL(DX(Solid9_relBearBack.Axial1_spring_diaphragm_a, Solid16_pressPlate.Axial1_spring_diaphragm_b)-33 , 0, Spline1, 0)

이와 같은 function 의 보다 상세한 내용 ( 문법 ) 에 대해서는 https://support.functionbay.com/ko/technical-tip/single/151 에서 expression handbook 을 다운로드 받을 수 있습니다 .
이렇게 정의된 비선형 스프링을 이용하여 해석을 수행한 후, 선형 스프링의 결과와 비교해보면 다음과 같습니다.
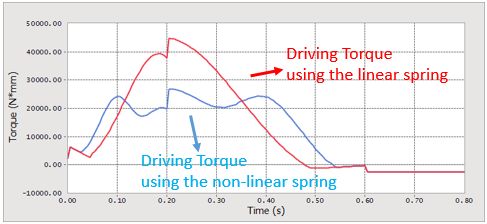
또한 비선형 스프링을 이용한 경우와 선형 스프링을 사용한 경우, 페달에 가해져야 하는 토크의 크기도 달라진 것을 확인할 수 있습니다.
그만큼, 비선형 스프링의 특성을 활용하는 장점이 존재하는 것이죠.
한가지만 더 소개해보겠습니다.
MBD for ANSYS로 모델링한 클러치는 RecurDyn (리커다인) 모델로 손쉽게 변환이 가능합니다. Export기능을 통해 *.sdk 라는 파일을 export하고, 이를 RecurDyn에서 Import하기만 하면 됩니다.
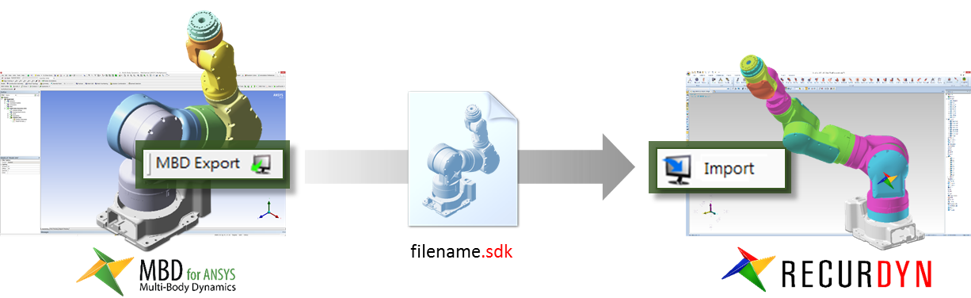
이렇게 import된 모델은 RecurDyn에서 곧바로 해석하는 것도 가능하며 RecurDyn이 지원하는 Full Flex를 비롯한 다양한 확장 기능을 이용하여 모델을 해석하는 것도 가능합니다.
예를 들어, 본 글에서 언급하였던 다이어프램 스프링을 유연체로 포함하여 transient analysis를 하는 것도 가능하며 그 결과는 다음과 같습니다.
만일 다이어프램 스프링의 유연체 특성 자체에 관심이 있다면 Full Flex 기능을 이용하여 다이어프램 스프링을 유연체로 모델링한 시뮬레이션이 필요하겠지만, 대신에 강체 모델에 비해 해석 시간이 길어질 것입니다.

만일 다이어프램 스프링보다는 클러치 다른 부분의 거동에 관심이 있다면 굳이 유연체를 이용할 필요 없이 강체와 스프링만을 이용한 해석을 하는 것이 좋습니다.
이 때, 만일 비선형 스프링의 특성을 갖고 있다면 선형 스프링을 이용하여 해석하는 것보다 비선형 스프링을 이용하여 시뮬레이션을 하는 것이 보다 나은 결과를 제공할 수 있습니다.
특히 이 클러치 모델을 가지고 여러 번 해석을 수행해야 한다면 강체 모델을 이용한 이점은 보다 클 수 있습니다.
참고로 본 글에서 사용한 비선형 스프링의 특성은 RecurDyn에서 다이어프램의 유연체 바디와 이에 대한 간단한 동역학 모델을 가지고 해석하여 얻은 결과를 이용하였습니다. (단순화된 모델은 전체 모델에 비해 해석시간이 매우 짧습니다.)
MBD for ANSYS 및 RecurDyn에 대해 보다 많은 정보를 원하신다면
다음 사이트를 방문 해 해 주세요. http://support.functionbay.com