
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
작성일
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
RecurDyn으로 만든 동역학 모델을 Matlab / Simulink 로 만든 제어기 모델과 연동하여 해석을 수행하는 것이 가능합니다.
Simulink 와의 연동해석 과정은 아래와 같이 4단계로 진행됩니다.
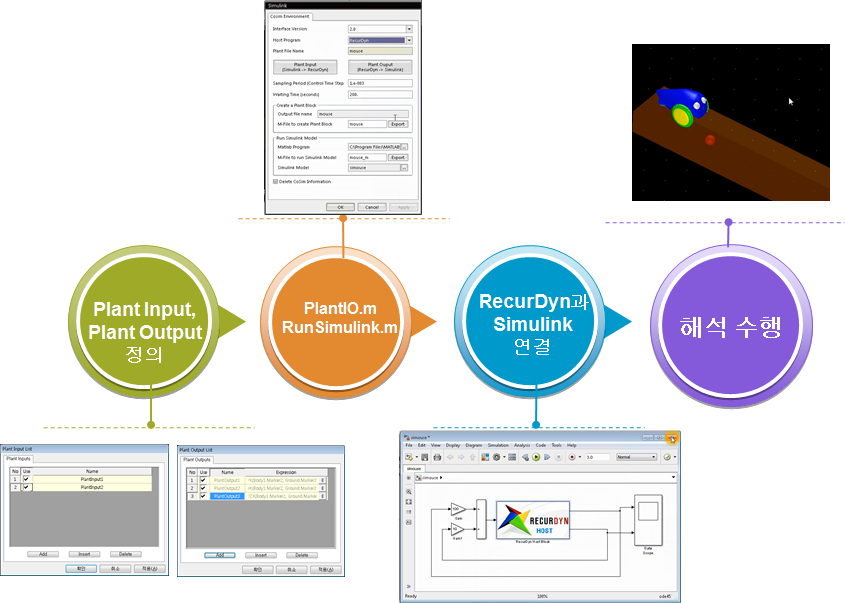
여기서 주의해야할 것은 Simulink 에서 RecurDyn 블록을 삽입하고 Co-Simulation을 하기 위해서는
다음과 같이 2개의 m파일을 생성하고 Matlab 내에서 실행해주어야 한다는 것입니다.
(Simulink가 Host일 때는 PlantIO.m만 생성하여 사용하면 됩니다.)
아래의 영상은 RecurDyn을 Host로 했을 때와 Simulink 를 Host로 했을 때, Co-simulation 과정을 보여줍니다.