{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
Posted on
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
RecurDyn provides not only general forces such as spring force, axial force, screw force, and bushing force but also specialized forces like matrix force and beam force.
A. General Force
: Spring force, axial force, screw force and others
(1) Translational Spring + Damper
A translational spring is the most widely used force and a mechanical element that is created by winding a spring steel into a coil. Accordingly, when a spring is distorted by applying an external force, it can absorb or store energy using its elasticity and use this energy to return to its original shape. Generally, springs are widely used in the suspension systems of automobiles or bed mattresses. This can be modeled using RecurDyn's Spring Force.

Translational Spring Force (+damper)
(2) Rotational Spring Damper
A rotational spring is a mechanical element created by winding a spring steel into a spiral shape. It is also called a spiral spring. It stores elastic energy by winding itself into a spiral form and uses the stored energy when it reverts to its original shape. This can be modeled using RecurDyn's Rotational Spring Force.

Rotational Spring Force (+damper)

Axial Force
(4) Rotational Axial Force
A rotational axial force allows you to define the action and reaction torques at a rotational axis defined between two objects as a function of time.

Rotational Axial Force
(5) Translational Force
A translational force allows you to define three forces in the three translational directions, which are the x, y, and z axes of an object, as a function of time. Since you can change the reference frame for the direction of a force, you can consider the motion of a body when applying a translational force to the body.

Translational Force
(6) Rotational Force
A rotational force allows you to define the torque for each of the three rotational axes of a body as a function of time.

Rotational Force
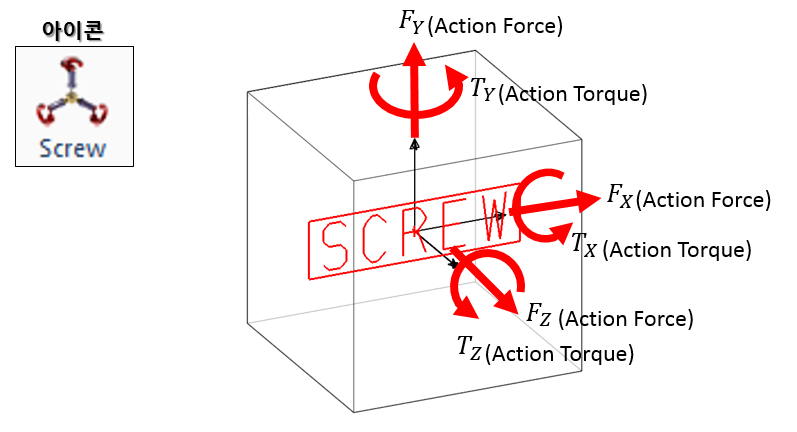
(7) Screw Force
A screw force allows you to define the translational forces and torques in the three translational directions and the three rotational axes of a body as a function of time.