
Applications in Robotics Industry 글 편집 글 편집 (이전 에디터)

Use RecurDyn multibody dynamics simulation to develop your robots or components.
RecurDyn is an innovative simulator for:
Walking robots, manufacturing robots, robot arms, parallel robots, ...

Are you developing a Robot or related components?
If so, you may have validation, troubleshooting, or other issues like:
- Difficulty defining appropriate motion of each joint in the early stages of robot development
- Selection of optimum motor capacity or determination of motion appropriate for the allowable capacity
- Deformation and vibration of parts and joints due to high-speed operation
- Validation of abnormal operation detection and countermeasure algorithms
- Validation of the posture control, speed control, or various other actions including walking
- Reduction of energy consumption through weight reduction and optimization
- Difficulty in designing springless shock absorption mechanisms in miniature robots
-
Potential of product damage to the robot or operator injury during testing
Multibody dynamics simulation using RecurDyn is used in robotics and robot component development for such things as:
- Calculation of motion for each joint of a robot using inverse kinematics
- Optimum motor capacity selection through the calculation of torque variance and maximum torque
- Evaluation of influence of deformation and vibration of the robot’s parts on precision of its motion and durability analysis of parts and joints through simulation
- Simulation and evaluation of shock and vibration experienced by parts such as bodies, wheels, arms, and legs
- Verification of behavior algorithms such as posture, speed control, obstacle avoidance, walking and stair climbing of a complete robot that includes a controller
- Determination of the optimal gain for PID control
- Energy consumption reduction through weight reduction and optimization
- Virtual robot simulation without damage and safety risks
▶ Simulate Every Robot in Motion
Articulated Robot, SCARA Robot, Parallel Robot, Mobile Manipulator,
End Effector, AMR (Autonomous Mobile Robot) and others

▶ Manufacturing Robot Development
and durability analysis
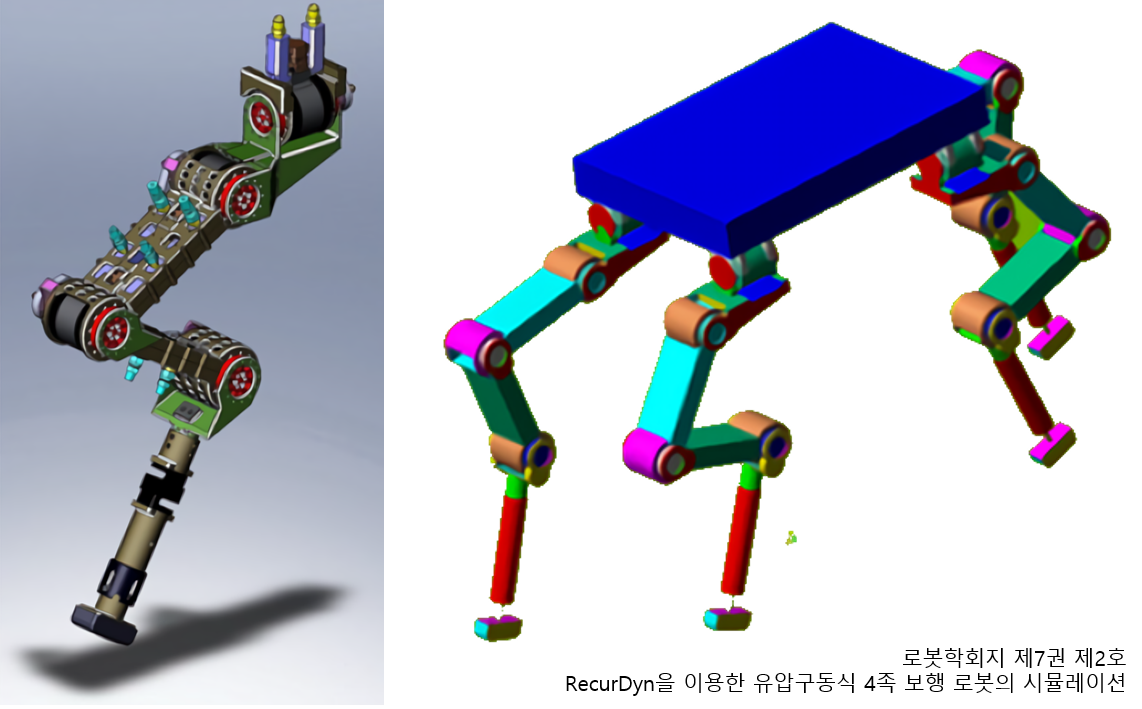
▶ Robot Driving Simulation
Simulation of a stair-climbing robot
▶ Everything about Robot Simulations
Tracked Mobile Robot, Humanoid, Exoskeleton, Medical Robot, Service Robot and others

Click the image for the detailed case studies, including walking robot simulation, parallel robot, wearable robot, robot arm and robot controller validation.





List of the presentations for each country (presentation materials are not available)
2018
Gyeongnam Technopark - Design of 4-axis palletizing robot using technique of controller optimization
2017
Korea Institute of Robot and Convergence - Development of professional service robot with multi-degree-of-freedom using MBD for ANSYS
Technische Hochschule Mittelhessen - Support for the Application Assessment of Collaborative Robot Systems by Multibody Simulation
2016
Prof. Zheng - The Design and Simulation of Assistive Robot for Disabled
Prof. Huang - Walking State Analysis of Robot Control Using RecurDyn Simulation
2015
Hanwha - A study of the design and analysis method to reduce the impact vibration of a mobile robot
Hanwha - A study of the design and analysis method to reduce the impact vibration of a mobile robot
ITRI - Six-Axis Articulated Robot Calibration Issues
NCTU
- Robot Claw with Flexible Driving Simulation
2014
NCTU - Trajectory Planning with Energy Efficiency for Robotic Manipulators
2013
IDAJ Co. LTD - Multibody dynamics simulation and contact parameter of snake robot with three-dimensional motion
NCTU - The Trajectory Planning and Dynamic Simulation of Robot
Mitsuba - Analysis of noise and vibration of a small motor using RecurDyn
2011
TTDC - Development of partner robot using RecurDyn as a software test tool
Yaskawa
- Dynamic analysis for motion control
2008
KITECH - The case of dog horse robot modeling using RecurDyn

Click the image to watch how to use RecurDyn








Danny Shin
- Tel: +82-031-622-3716
- e-mail: info@functionbay.com
or you can find FunctionBay branches or agencies from the below link in your region. https://support.functionbay.com/en/contact-form

