
{{ post.title }} 글 편집 글 편집 (이전 에디터)
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.tutorial.upload_filename }} | Attached File | {{ post.attachment.upload_filename }} |
{kind=link}
In this tutorial, you will simulate and control a dynamic system using CoLink, an interactive environment for designing, simulating, and testing time-varying systems. You will define a control system in CoLink to control a mechanical system that you create in standard RecurDyn.
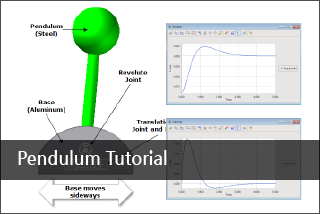
The system to be simulated is a simple inverted pendulum which is mounted on a base which can move side to side. The pendulum can be balanced in its upright position by applying a sideways force to the base. In this tutorial, you will implement various control systems to control this sideways force.