
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
Posted on
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
How to use a velocity PID controller
The following procedure explains how to apply the velocity PID controller to a dynamic model in RecurDyn.
In order to apply the velocity PID control in RecurDyn, we will use the CoLink toolkit included in RecurDyn. This toolkit allows you to model control systems that can interact with RecurDyn dynamic models.
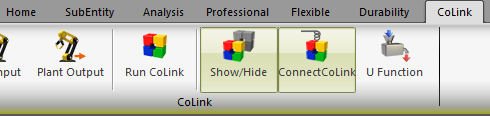
On the CoLink tab, click Run CoLink. When CoLink opens, use the blocks and symbols available to create a control model.

This article uses the above sample model to explain how to control RecurDyn dynamic models with CoLink. (velocity PID control)
This model is a sphere that performs a constant translational motion along an inclined surface in the direction indicated by the arrow shown below.
The model also defines both the contact and friction conditions between the sphere and the surface.
In this model, if you apply a constant rotation to the sphere, the translational speed of the sphere may not be constant because of the frictional force that occurs at each point of contact.
You can solve this problem by connecting the model to CoLink and controlling it with the PID velocity control mechanism to maintain constant velocity. CoLink receives the translational speed of the sphere and adjusts the rotational torque of the sphere so that it performs a constant translational motion.
To connect the model to CoLink and control it with the velocity PID controller, perform the following steps:
Creating a CoLink Control Model in RecurDyn
1. Define the rotational axial force in the sphere.

2. Define the Plant Input.

3. Define the Plant Output.
The Plant Output can be an expression. This sample model uses the VM() function to define the speed of the sphere body as the output.

4. Create a CoLink model.
Click the ConnectCoLink icon to activate CoLink. Click the Run CoLink icon, and then perform the following steps to create a CoLink control model.
This mode uses only a PD controller. (References: PID Control Tutorial) (I is not used)

5. Simulate the CoLink model.
In CoLink, on the Simulation tab, click Start to start the simulation and analyze the results.
