
CoLink 글 편집 글 편집 (이전 에디터)
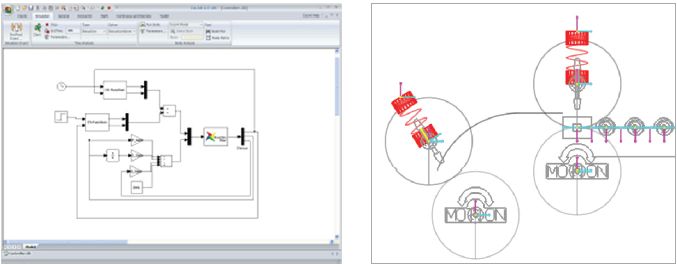
RecurDyn/CoLink is a powerful, flexible, and efficient controls design and simulation tool. Control systems are designed graphically using block modeling usually for hydraulics simulation or mechatronics simulation. (1D CAE) RecurDyn can be coupled with CoLink, using RecurDyn as a plant model for the control system.
CoLink has a large library of electronic controller components. It has a very simple and intuitive user interface to enable very rapid development of sophisticated control systems. CoLink is highly extensible. Control blocks can be customized using the C programming language.
Control systems modeled using CoLink execute extremely efficiently. CoLink is tightly coupled with RecurDyn at the formulation level. Unlike co-simulation, CoLink can be simulated with RecurDyn more efficiently than co-simulation between other 1D CAE software and other multibody software.
CoLink, a control system simulator integrated into RecurDyn, allows the user to model complicated control systems, electrical systems and hydraulic systems. It also provides a platform for the mechatronics simulation of the mechatronics system, an integrated analysis of firmware design, electronics design and mechanical system design by coupling RecurDyn.

Benefits
- Controls engineers can efficiently test control algorithms early in the design process with highly nonlinear dynamic models. (mechatronics simulation)
- Mechanical systems may include control systems (whether electronic, hydraulic, etc.).
- The mechanical engineer and the controls engineer can join their independent design models.
- Controls engineers may struggle to develop robust controllers early in the design process because of the difficulty in constructing nonlinear dynamic models within controls software.
- These difficulties can be avoided by simultaneously developing the mechanical model in RecurDyn and the control system in CoLink.
Process
- All mechanical components and constraints are modeled with Multi-Body Dynamics model of RecurDyn.
- The control system can be modeled easily in CoLink.
- Plant (RecurDyn) outputs are passed from RecurDyn to CoLink and Control outputs are passed from CoLink to RecurDyn (it is possible to use a constant sampling rate)
CoLink VS. Co-simulation Method
| CoLink | Co-simulation | |
|---|---|---|
| Accuracy | The accuracy of analysis result is high because of integrated analysis. | The accuracy of analysis result is low because data is exchanged at the sampling time only. |
| Speed | The analysis speed is very fast because CoLink uses the integrated solver. | The analysis speed is slow because of the communication time between different software. |
| UI | The Parametric Value defined by RecuDyn can be used in the CoLink model. | The data between the softwares is not interoperable. |
Various Features of CoLink
Modeling of a complicated mechatronic system can be easily performed because it is possible to represent a control system with a logical block diagram. The data transfer between the controller and the mechanical system is clearly defined.

Frequently used block libraries in the electrical / electronic / control system are provided to allow the user to easily create a complicated controller.
- An integrated solver can simultaneously analyze the dynamic model and the controller as a continuous system and provide a fast and accurate analysis.
- A discrete system can also be analyzed by co-simulation (A CoLink model with no connection with a RecurDyn model can be also analyzed).

{kind=link}
- It is possible to verify the complex lifting behavior in an agricultural attachment with a hydraulic cylinder in advance.
- This was done using co-simulation between RecurDyn and SimulationX (1D-CAE Software) using FMI.
