
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
Posted on
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
This section explains how to make a body that is constrained by a joint perform a free motion when certain conditions, which can be defined as an expression of time or sensors are satisfied during simulation.
RecurDyn can make a motion, to which a certain condition is applied (defined as an expression), "0". But, "0" means no motion, not free motion. Therefore, during actual modeling, you need to create a virtual dummy body and force. (In this case, the dummy body and force should not affect the motion and analysis results that you want.)
Let's use the following example to learn how to create such a simulation model.

In the above figure, a translate joint was created for a box body that is connected to the ground body with a spring force. Then uniform motion was applied to the box body in the rightward direction, which is the opposite direction of the spring force, for 0.5 seconds at a constant velocity. After 0.5 seconds, uniform motion disappears and the box body returns to the left due to the spring force.
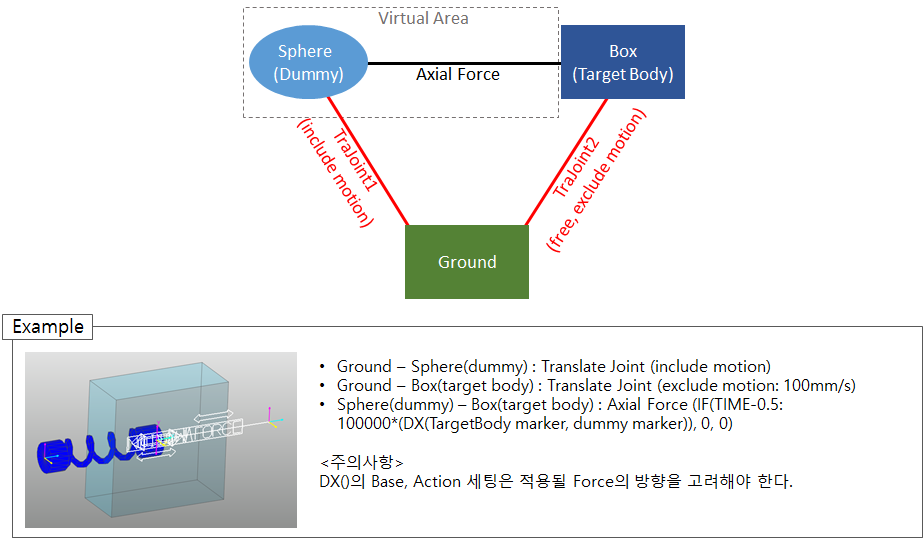
** Note) The direction of the force should be considered for the Base and Action marker of DX(...)
The principles are shown in the above figure.
1. A dummy body (sphere) with a negligible weight was created near the center of the target body (box).
2. An axial force was created between the target body and the dummy to fix them with a strong spring force as if they are one body. (The spring force is defined as an expression. Refer to the expression shown below.)
3. Then, the uniform motion was applied between the ground and the dummy using a Translate Joint 1.
4. Therefore, the target body is indirectly connected to the ground through the axial force between it and the dummy.
5. Now, use the IF() function to change the virtual spring force to "0" after 0.5 seconds.
6. Then the connection between the target body and the dummy body is broken completely. This also breaks the indirect connection between the target body and the ground.
- Virtual Force Expression : IF(TIME-0.5: 100000*(DX(TargetBody marker, dummy marker)), 0, 0)
This makes the target body perform a free motion due to the Translate Joint 2, for which no motion is defined, between the ground and the target body.
You can apply different conditions and joints by utilizing this example and simulate more sophisticated motions.