
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
Posted on
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
ANSYS structural analysis powered by MBD for ANSYS and RecurDyn

Applications of MBD for ANSYS
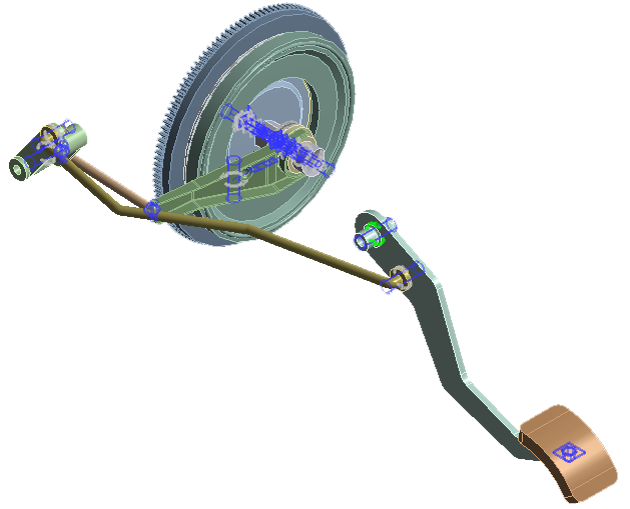
When the pedal is depressed, the prongs of the fork moves backwards, in the –X direction

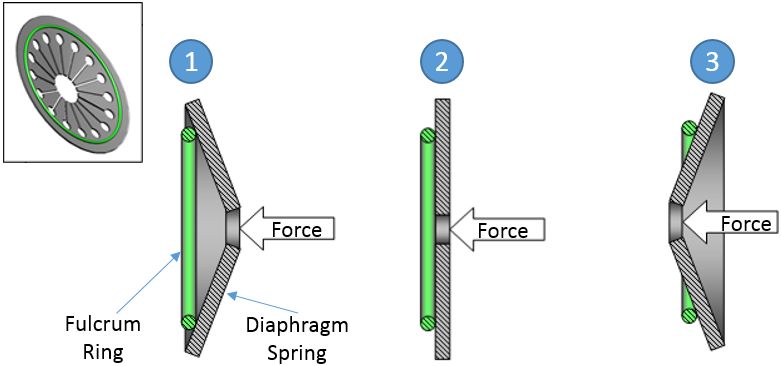
The movement of the fork affects the force applied to the diaphragm spring which is a key component of the clutch plate mechanism.
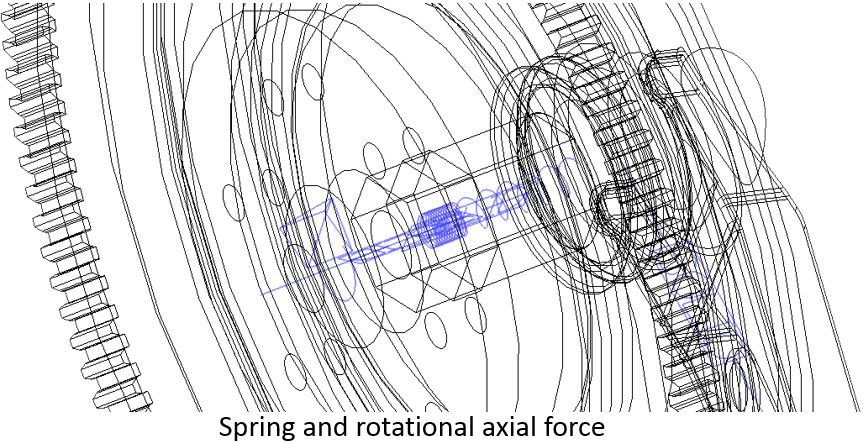
But diaphragm spring is not included in Rigid Body model because it is a flexible component and Instead, the effects of the diaphragm spring on the other components will be simulated using a linear spring.

The flywheel receives torque from the engine.
When the clutch is engaged, the torque to be transferred to the input shaft. And the engagement is controlled by the movement of the pedal. And the diaphragm spring takes an important role for this mechanism.
2.
Modeling (linear spring)
The example model is approximated to resemble the real clutch but not accurately modeled because this is made for the educational purpose of multi-body dynamics and the usage of the linear and non-linear spring.
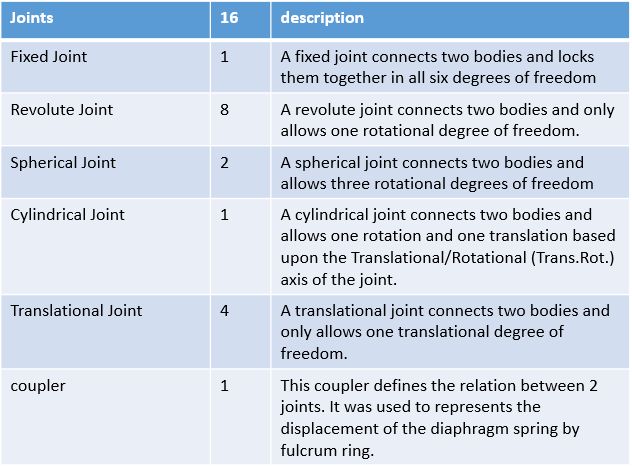
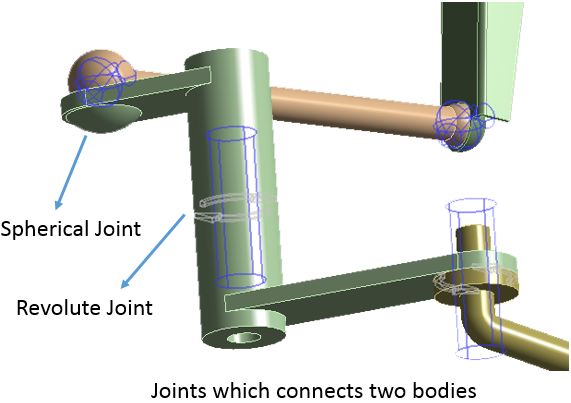
The example model is comprised of
14 rigid bodies
16 joints + 1 coupler
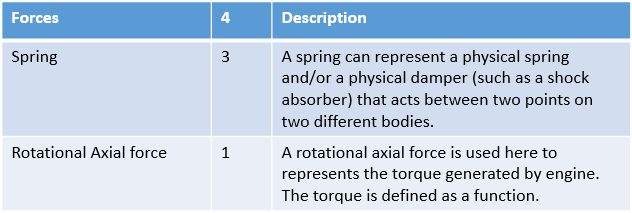
4 forces
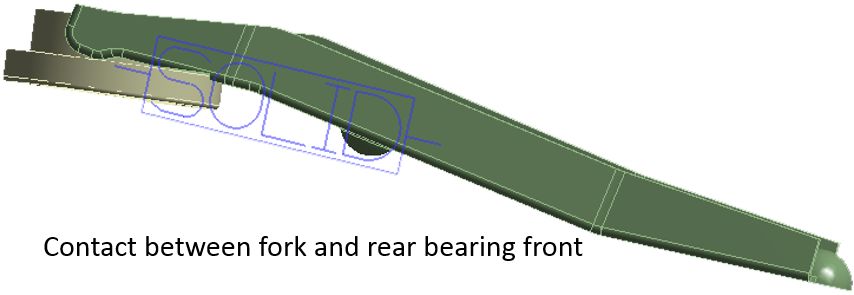
3 contacts

The completed Clutch Model is as below.
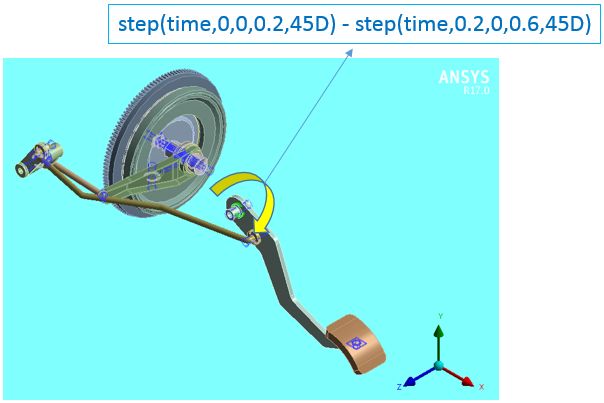
The Pedal rotates 45 degrees and rotates back to the initial position. To drive this motion, the below function is applied to the revolute joint, Revolute1_rev_pedal’
The below movie shows the simulation result using the linear spring.
If you are unable to watch this video, click the link below.
The simulation result can be reviewed from Plot mode either.
The above curve shows the rotation of the joint connected to the pedal. (Revolute1_rev_pedal)
Also, the driving torque which is required to rotate the pedal can be reviewed from the ‘Driving_Torque’ of ‘ Revolute1_rev_pedal’


The description so far was about the simulation using the linear spring, whose spring coefficient is constant. But real Diaphragm spring has non-linear stiffness so it must be considered to get the feasible result.
MBD for ANSYS supports the modeling of the non-linear spring. Let’s assume that we already have the non-linear characteristics of the spring (deflection vs. spring force)
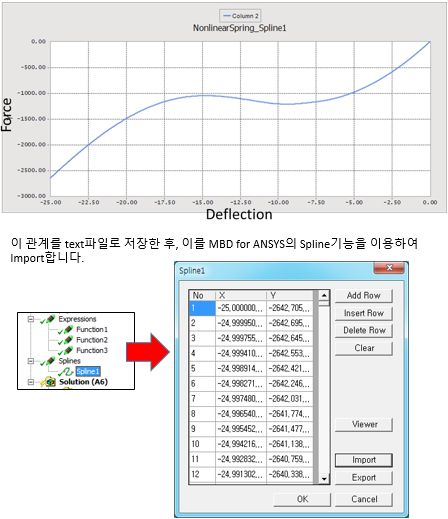
3. Modeling (non-linear spring)
To represent the non-linear Spring, axial force object can be used instead of the linear spring object. Here, we can define the function of the axial force as below.
-AKISPL(DX(Solid9_relBearBack.Axial1_spring_diaphragm_a, Solid16_pressPlate.Axial1_spring_diaphragm_b)-33 , 0, Spline1, 0)

This function returns the spring force from the spline data corresponding to the input value (deflection of the spring)
For more information about the grammar of the function, please download the expression handbook from the link,
https://support.functionbay.com/en/technical-tip/single/155
After replacing the linear spring with the non-linear spring, we can run a new simulation.

The driving torque required to rotate the pedal also changes.

4. Additional Information
One more thing.
The clutch model of MBD for ANSYS can be converted to RecurDyn model easily.
Users can export *.sdk file and it can be imported to RecurDyn.
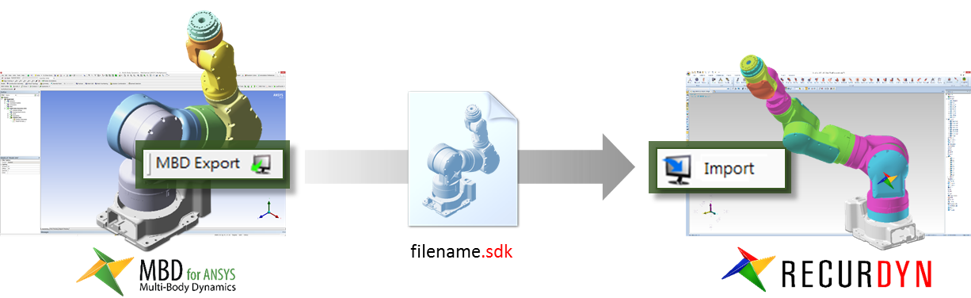
This imported RecurDyn model can be simulated inside RecurDyn. And it is also possible to enhance the model with the various functionalities of RecurDyn such as Full Flex (FFlex) and other application toolkits.
For example, the below movie shows the simulation result using the Full Flex model of the clutch model which includes the flexible diaphragm spring instead of the simple spring.
If you are unable to watch this video, click the link below.
If the flexible characteristics of the diaphragm spring itself is the main interest, Full Flex simulation must be needed. Instead the simulation time will get long.

But if the other components of the system are the main interest, the rigid body model using the non-linear spring can be a good choice.
In this case, if the characteristics of the non-linear spring is available, the non-linear spring can give the better simulation result than the linear spring
If repetitive simulation is required, the benefit of the rigid body simulation get bigger.
For your information, the characteristics of the non-linear spring was obtained from the below simple Full Flex model using RecurDyn. (The simulation time of the simple Full Flex model is much shorter than the complete model.)
If you are unable to watch this video, click the link below.
This article described how to enhance ANSYS Structural analysis using MBD for ANSYS and RecurDyn
For more information, please visit http://support.functionbay.com