
{{ post.title }} 글 편집 글 편집 (이전 에디터)
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.tutorial.upload_filename }} | Attached File | {{ post.attachment.upload_filename }} |
{kind=link}
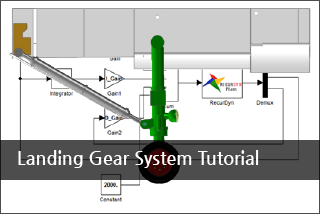
RecurDyn provides the CoLink module that is used to model a control system. If you use CoLink in RecurDyn, you will make an approximate model for control system. That means that the CoLink can directly control the RecurDyn model. Thus, if the RecurDyn model is fully validated, this approach can be a virtual control system. Suppose that a PID controller system controls the actuating force of a landing gear system.
The goal of controller is to move the wheel into the bay and make it to be stable in 2 seconds. As the CoLink directly uses the Parametric Values defined in RecurDyn, all gain values can be defined by using the parametric values. Also, the goal of control system can be represented by the Expressions. Thus, AutoDesign can find the optimal gain values easily to satisfy the goal of control system.