
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
Posted on
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
Since RecurDyn is a Multi-Body Dynamics software, Dynamic analysis is most frequently used.
Dynamic analysis has many parameters besides End Time and Step Size.
One of the most important parameter is Maximum Time Step . ( Solver – Becoming an Experienced User #1, First Episode: Learn about Maximum Time Step!)
Please refer to Solver – Becoming an Experienced User #2 Parameters in General Tab
in this article (#3), the parameters in 'Parameter tab' will be explained.
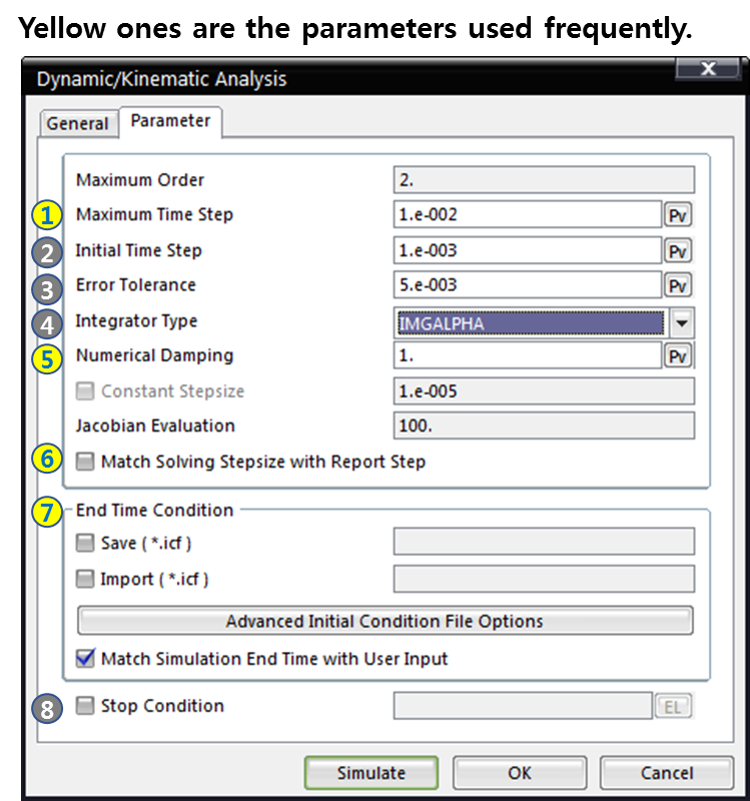
1.Maximum Time Step
1)Maximum step size which solver can use.
2)Since RecurDyn uses variable step size, the step size changes during simulation.
3)If the period of the changes of the result is about 0.,1s, you need to reduce the max. step size smaller than 0.1
4)Too small maximum time step can slower the simulation speed.
5)https://support.functionbay.com/en/technical-tip/single/107
2.Initial Time Step
1)In most of the cases, the default value 1.e-6 is good enough.
3.Error Tolerance
1)This is used to determine the size of the error for solver.
2)Small error tolerance make the simulation more strict. In most of the cases, you can use the default value.
4.Integrator Type
1)RecurDyn supports 2 types of integrator, IMGALPHA and DDASSL. And support TRKGALPHA and HYBRID for Track toolkit and FFlex
2)In most of the cases, IMGALPHA is a good choice. But please keep in mind the followings
- IMGALPHA : can solve the nonlinear problems such as contact. But it can cause unintended damping effect because of the numerical damping
- DDASSL : doesn’t has numerical damping effect. But in case of nonlinerar problems, IMGALPHA is recommended.
5.Numerical Damping
1)This can cause the damping effect even if there is no damper in the system.
2)If you want to remove the unintended damping effect, reduce the numerical damping or use the smaller maximum Time Step (smaller than 1/100 of the period of the vibration)
3)If the Numerical damping is small, the damping effect is reduced. But in case of nonlinear problems such as contact, simulation time can increase or solving can lockup.
4)In real system, there are several kinds of damping effects which cannot be included in the model, so in most of the cases you can use the default value.
6.Match Solving Stepsize with Report Step
1)The step size of the animation is uniform (endtime/steps). But the real step size of the solver or plot data is nonuniform. So you may cannot get the simulation result at the specific time instant. (for example, even if you want a result at 1.5s, the solver may calculate 1.47s then the next step can be 1.51 (step size is 0.04s)
2)By checking this option, the solver calculate the time instants at N*endtime/steps and match the animation step and the plot step.
7.End Time Condition
1)You can use the previous simulation results as the initial states.
2)https://support.functionbay.com/en/faq/single/197
8.Stop Condition
1)If the value of the specified expression is TRUE (non-zero value), the simulation stops.
2)You can reduce the calculation time by stopping simulation when specific condition is met.
3)For example, you can stop simulation when the distance between 2 specified bodies is less than 1mm.
9.Etc.
1)Jacobian Evaluation : only used for TRKGALPHA. Determines how often Jacobian is calculated
2)Constant Step Size : only used for TRKGALPHA. option to use the uniform step size
For the other parameters, please refer to the below articles.
- Solver – Becoming an Experienced User #1, First Episode: Learn about Maximum Time Step!
- Solver – Becoming an Experienced User #2 – Dynamic/Kinematic Analysis Parameters (General)
- Solver – Becoming an Experienced User #3 – Dynamic/Kinematic Analysis Parameters (Parameters)
- Solver – Becoming an Experienced User #4 – Simulation Parameter #1
- Solver – Becoming an Experienced User #5 – Simulation Parameter #2