
{{ post.title }}
글 편집
글 편집 (이전 에디터)
{{ post.author.name }}
Posted on
| Version | {{ post.target_version }} | Product |
{{ product.name }}
|
|---|---|---|---|
| Tutorial/Manual | {{ post.manual_title }} | Attached File | {{ post.file.upload_filename }} |
Let’s look at how to model the two-dimensional behavior of Revolute Joint (Pin Joint) considering clearance by using Expression, which is one of the RecurDyn's important functions. If there is a clearance between a pin and a hole, the pin and hole are freely movable in the clearance area, and contact force is generated when the pin and the hole are in contact with each other. This behavior can be analyzed more efficiently by using Joint, Force and Expression instead of the contact modeling elements of RecurDyn.
In this tip, let's figure out how to express the contact stiffness equation of the pin and hole considering clearance as an Expression function and apply it to the actual RecurDyn example model.
1. How to obtain the contact force between a pin and a hole by stiffness equation taking clearance into account
First, the method of calculating the amount of penetration (infiltration) during contact considering the clearance is as follows.

<Calculation of the amount of penetration with clearance>
Using the equation regarding the amount of penetration obtained above, the contact force for each direction can be expressed as a stiffness equation as shown below.
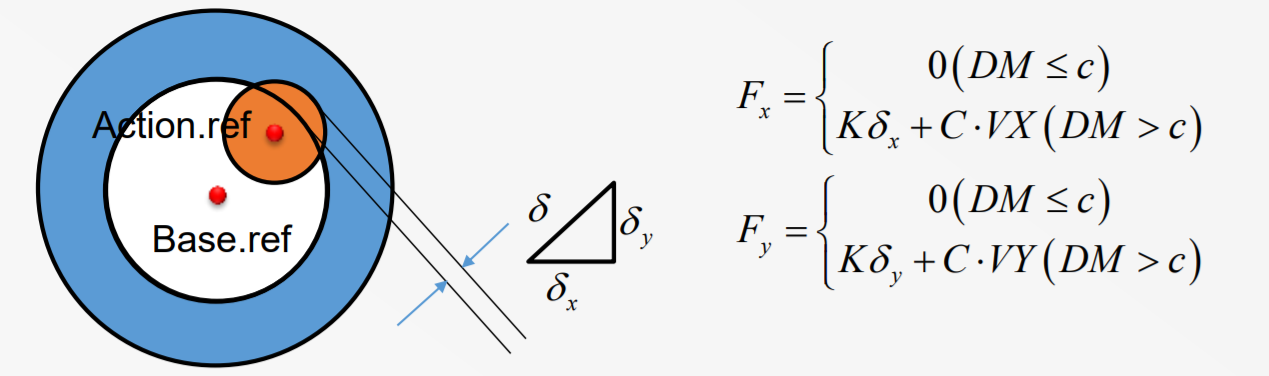
<Contact force using stiffness equation>
2. How to implement the Expression of contact force expressed by stiffness equation (rigid expression) in each direction
In RecurDyn, the stiffness equation obtained from the Expression above can be implemented.
-
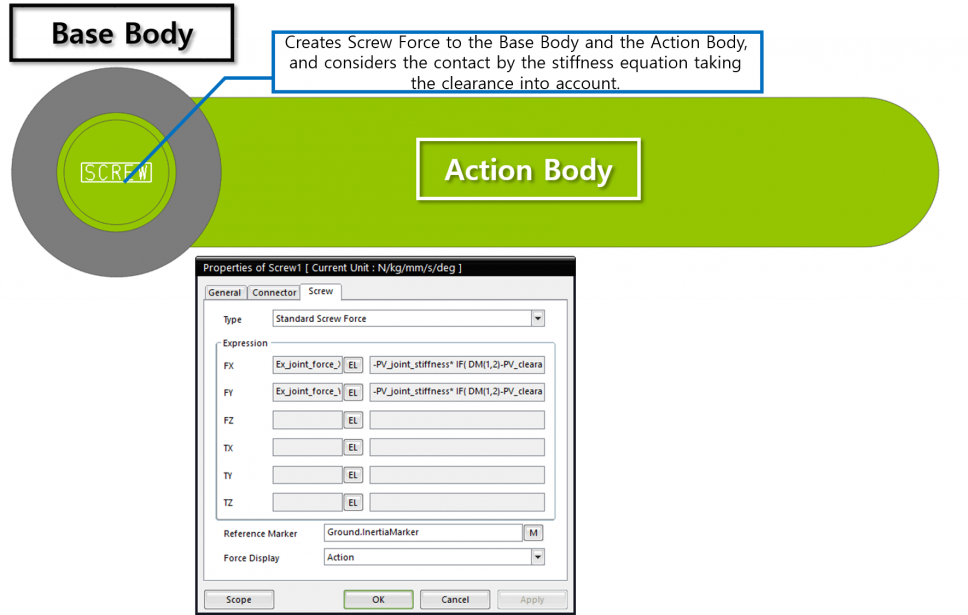
Implementation of stiffness equation for X direction displacement as Expression
- PV_joint_stiffness* IF( DM(1,2)-PV_clearance: 0, 0, (1-PV_clearance/DM(1,2))*DX(1,2,2) )
- PV_joint_damping* IF( DM(1,2)-PV_clearance: 0, 0, VX(1,2,2) )
Implementation of stiffness equation for Y direction displacement as Expression
- PV_joint_stiffness* IF( DM(1,2)-PV_clearance: 0, 0, (1-PV_clearance/DM(1,2))*DY(1,2,2) )
PV_joint_damping* IF( DM(1,2)-PV_clearance: 0, 0, VY(1,2,2) )
Refer to the image below for the Parametric Value and Argument List used. The Parametric Value should be defined using the Parametric Value function of RecurDyn and the Argument List should be also defined in the Expression properties window when the Expression function is created. For more information, refer to the related manual.

Argument List Manual (hyperlink)
For an implementation of the Expression function, refer to the example model below.
3. Practice with the RecurDyn example model
[Example Model Download (Click)] [Descriptions for RecurDyn Model]
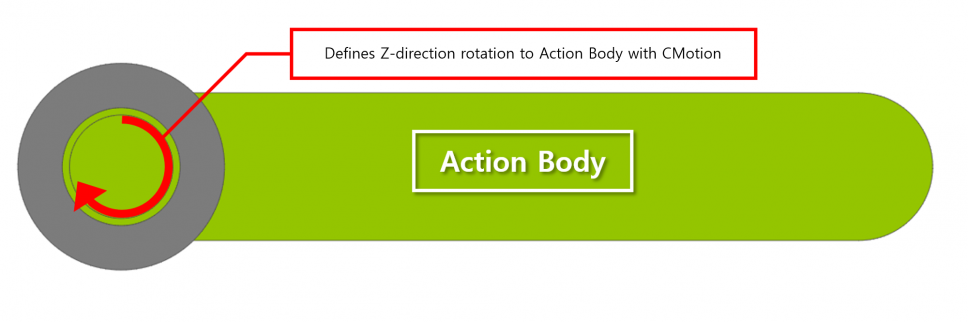
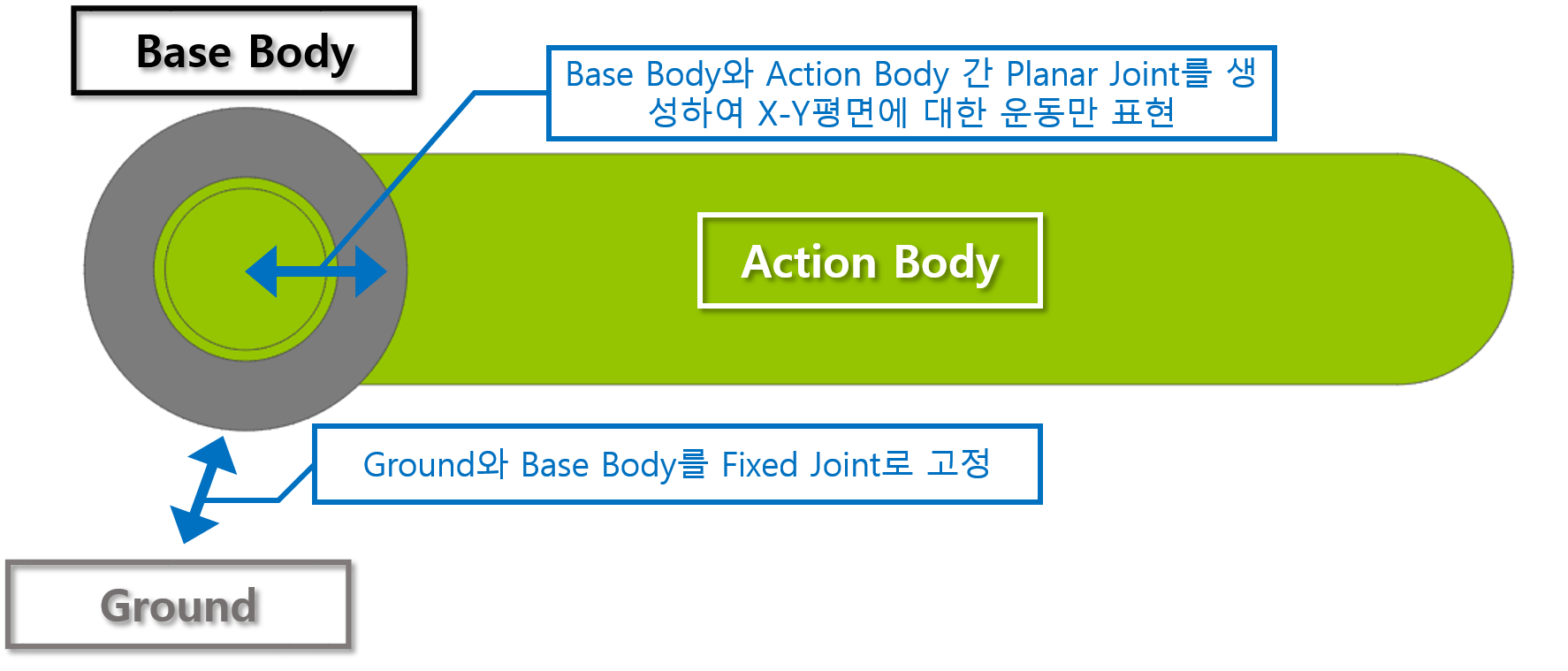
- Rotates the Action Body using CMotion
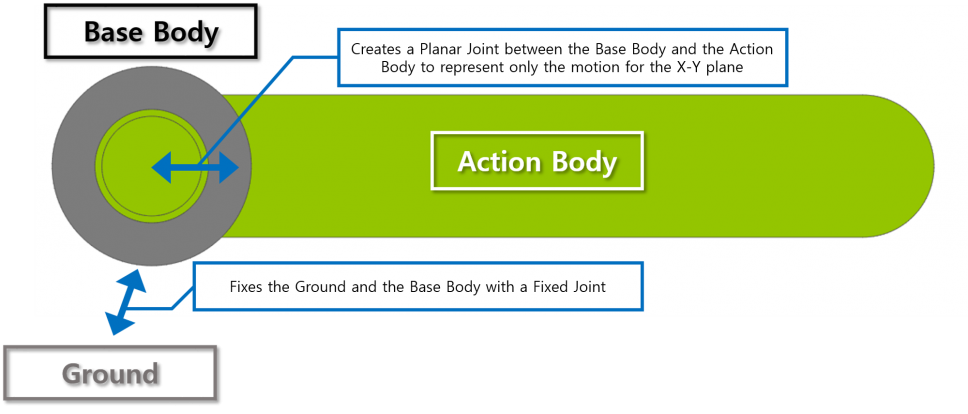
Represents the motion for the X-Y plane only using Planar Joint. Enters clearance and stiffness as Expression by using Screw Force instead of Joint or Contact.
For more information on CMotion and Planar Joint, click here (Link) and refer to 'Degrees of freedom depending on the joint type'.
 Now, it is time to create a certain random tension to the action body, and move and rotate it to the clearance area of the joint.
Now, it is time to create a certain random tension to the action body, and move and rotate it to the clearance area of the joint.
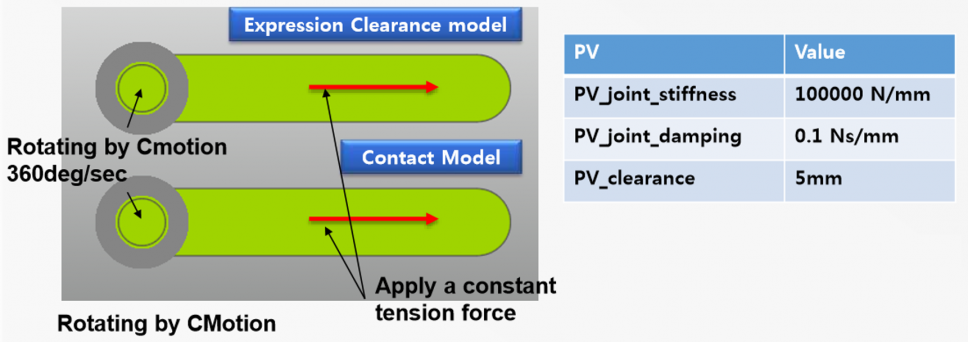
Due to the clearance, a path of center of the action body moves in a circle and has the same effect as the model using the contact (The example model includes a model using contact). It takes 50 seconds to analyze the contact model while analyzing for Expression model takes about 0.5 seconds. There is about 1wpep00 times difference in analysis speed.
{kind=link}
관련 글
- The various forces and torques supported by RecurDyn
- The various joints supported by RecurDyn
- Parametric Value Manual (hyperlink)
- Argument List Manual (hyperlink)
- GoPowerUser, Fourth Episode: A guide to Using RecurDyn Expression Functions (Various Load Conditions)
- GoPowerUser, Third Episode: A guide to Using RecurDyn Expression Functions (IF and STEP)
- GoPowerUser, First Episode: A guide to Using RecurDyn Expression Functions (Basic)
- Expression Function Handbook